

Question: Q4. (4 marks) A control system has the following transfer functions in its block diagram: y(s)=(20s+1)15e12su(s)+(6.0s+1)5e2sd(s)AssumeGt=Gm=Gv=1.0 Where, in deviation variables, y is the process output
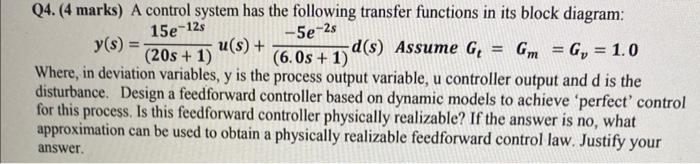
Q4. (4 marks) A control system has the following transfer functions in its block diagram: y(s)=(20s+1)15e12su(s)+(6.0s+1)5e2sd(s)AssumeGt=Gm=Gv=1.0 Where, in deviation variables, y is the process output variable, u controller output and d is the disturbance. Design a feedforward controller based on dynamic models to achieve 'perfect' control for this process. Is this feedforward controller physically realizable? If the answer is no, what approximation can be used to obtain a physically realizable feedforward control law. Justify your
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock