

Question: Question 2. Mobile Robotics Consider the rectangular environment shown in Figure Q2a. The size of the environment is the following: the lengths of the bottom
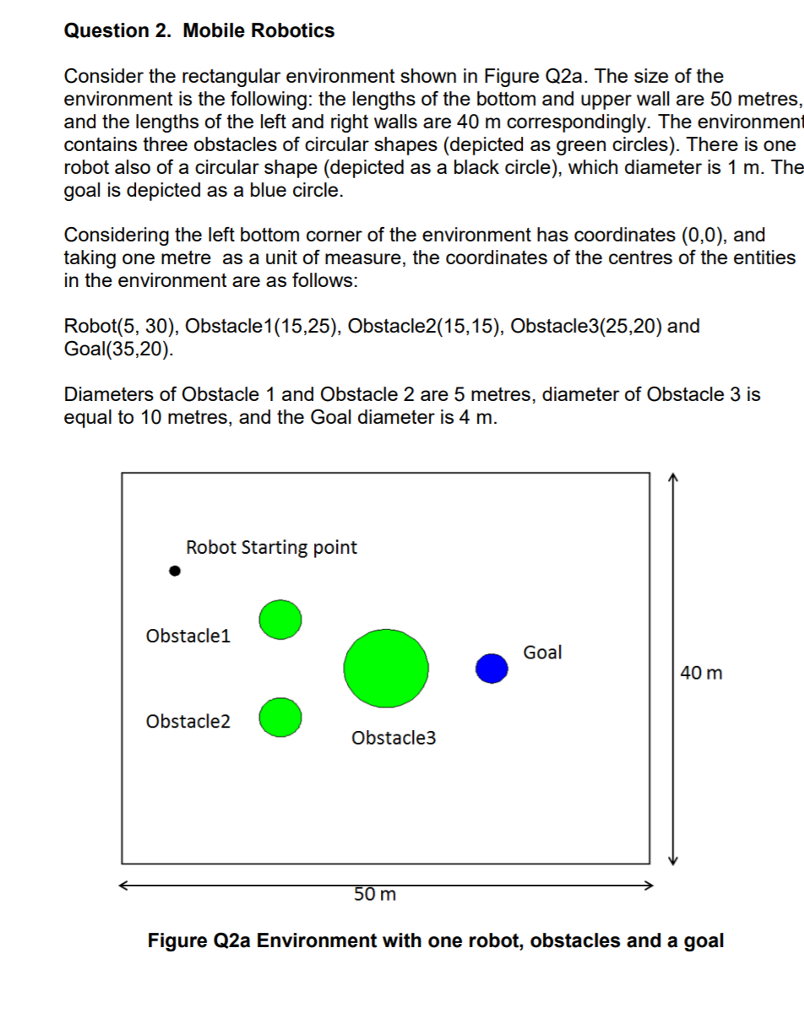
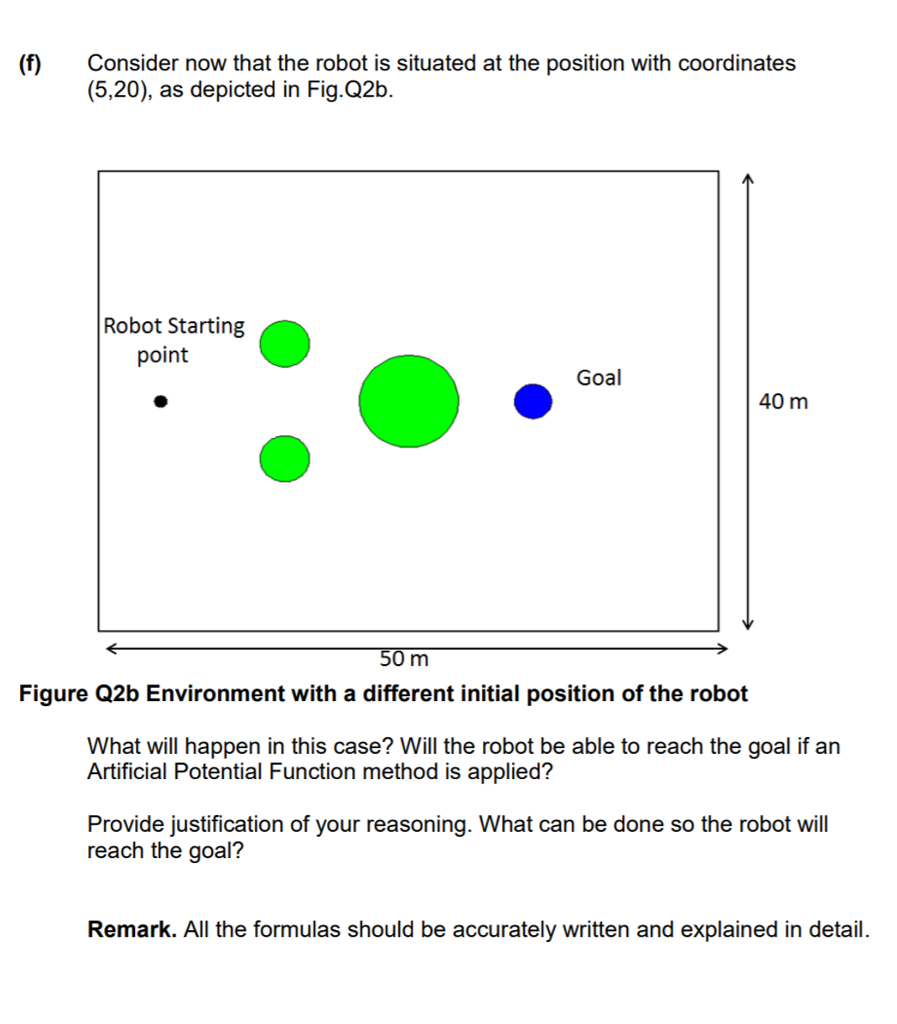
Question 2. Mobile Robotics Consider the rectangular environment shown in Figure Q2a. The size of the environment is the following: the lengths of the bottom and upper wall are 50 metres, and the lengths of the left and right walls are 40 m correspondingly. The environment contains three obstacles of circular shapes (depicted as green circles). There is one robot also of a circular shape (depicted as a black circle), which diameter is 1 m. The goal is depicted as a blue circle. Considering the left bottom corner of the environment has coordinates (0,0), and taking one metre as a unit of measure, the coordinates of the centres of the entities in the environment are as follows: Robot(5, 30), Obstacle1 (15,25), Obstacle2(15,15), Obstacle3(25,20) and Goal(35,20) equal to 10 metres, and the Goal diameter is 4 m. Robot Starting point Obstacle1 Goal 40 m Obstacle2 Obstacle3 Figure Q2a Environment with one robot, obstacles and a goal (f) Consider now that the robot is situated at the position with coordinates (5,20), as depicted in Fig.Q2b. Robot Starting point Goal 40 m 50 m Figure Q2b Environment with a different initial position of the robot What will happen in this case? Will the robot be able to reach the goal if an Artificial Potential Function method is applied? Provide justification of your reasoning. What can be done so the robot will reach the goal? Remark. All the formulas should be accurately written and explained in detail. Question 2. Mobile Robotics Consider the rectangular environment shown in Figure Q2a. The size of the environment is the following: the lengths of the bottom and upper wall are 50 metres, and the lengths of the left and right walls are 40 m correspondingly. The environment contains three obstacles of circular shapes (depicted as green circles). There is one robot also of a circular shape (depicted as a black circle), which diameter is 1 m. The goal is depicted as a blue circle. Considering the left bottom corner of the environment has coordinates (0,0), and taking one metre as a unit of measure, the coordinates of the centres of the entities in the environment are as follows: Robot(5, 30), Obstacle1 (15,25), Obstacle2(15,15), Obstacle3(25,20) and Goal(35,20) equal to 10 metres, and the Goal diameter is 4 m. Robot Starting point Obstacle1 Goal 40 m Obstacle2 Obstacle3 Figure Q2a Environment with one robot, obstacles and a goal (f) Consider now that the robot is situated at the position with coordinates (5,20), as depicted in Fig.Q2b. Robot Starting point Goal 40 m 50 m Figure Q2b Environment with a different initial position of the robot What will happen in this case? Will the robot be able to reach the goal if an Artificial Potential Function method is applied? Provide justification of your reasoning. What can be done so the robot will reach the goal? Remark. All the formulas should be accurately written and explained in detail
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts