

Question: Question 2 shown below I have attempt question 2a however incomplete. Need help to check if my solution for 2a is correct. Need help to
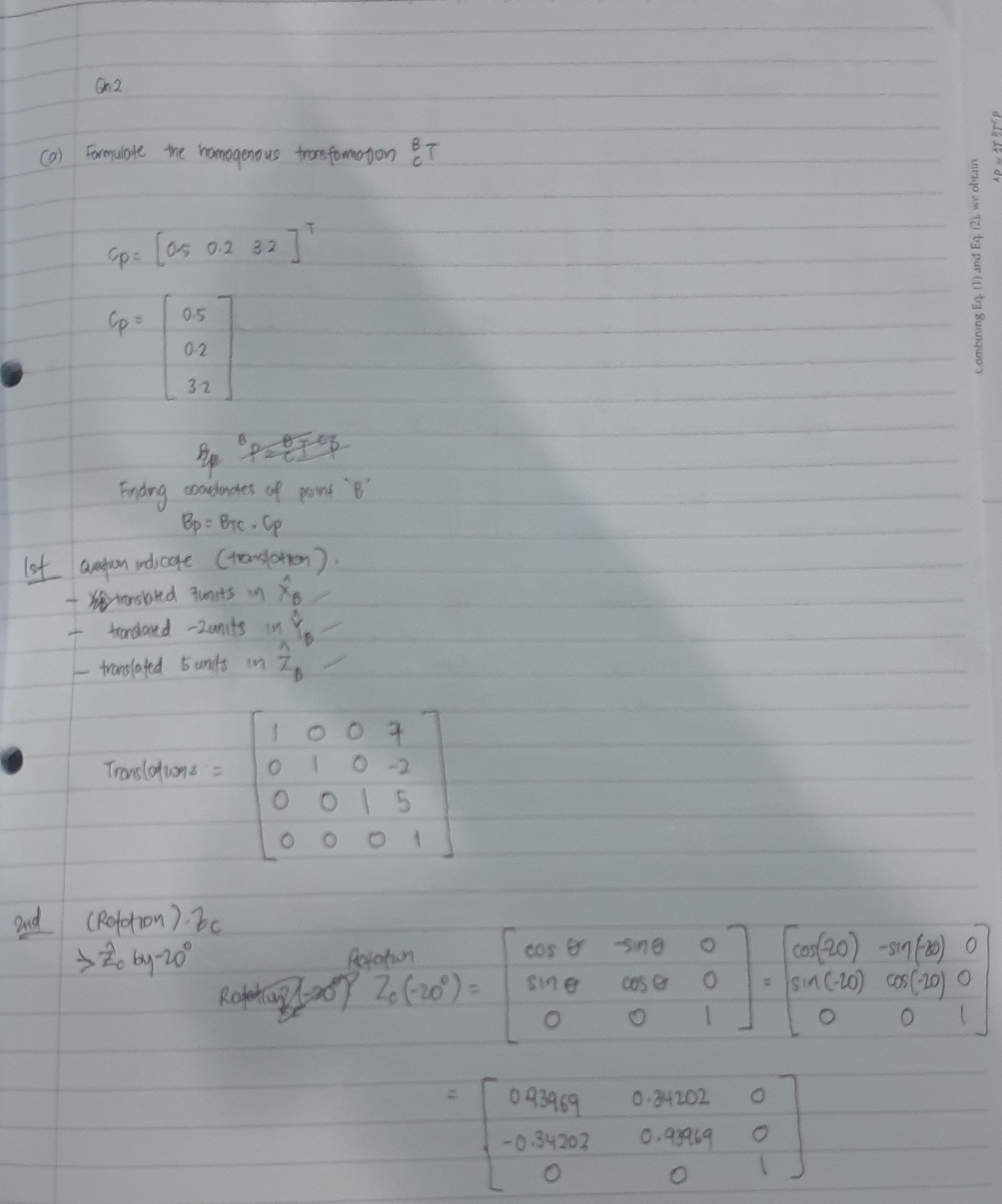
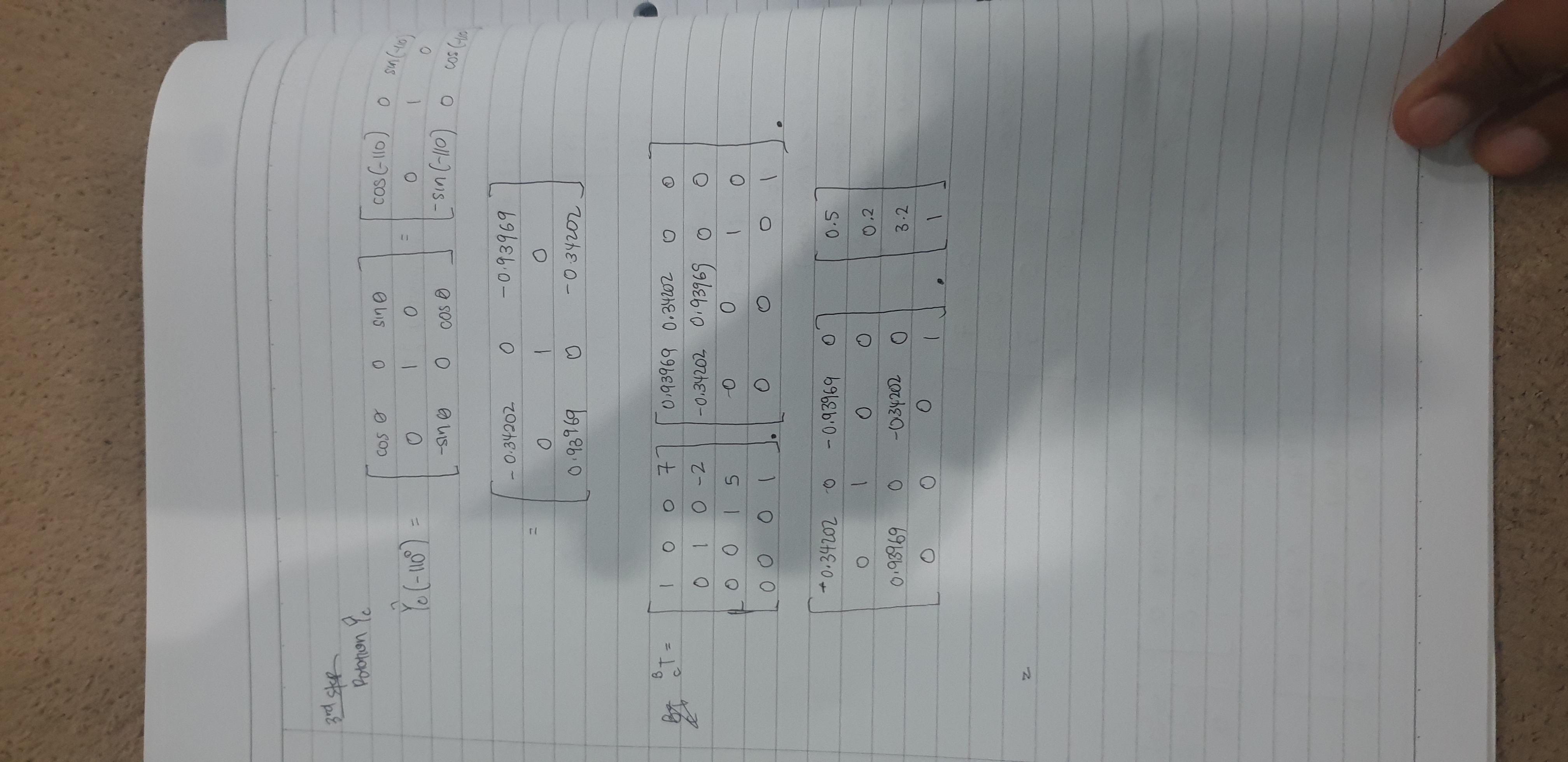
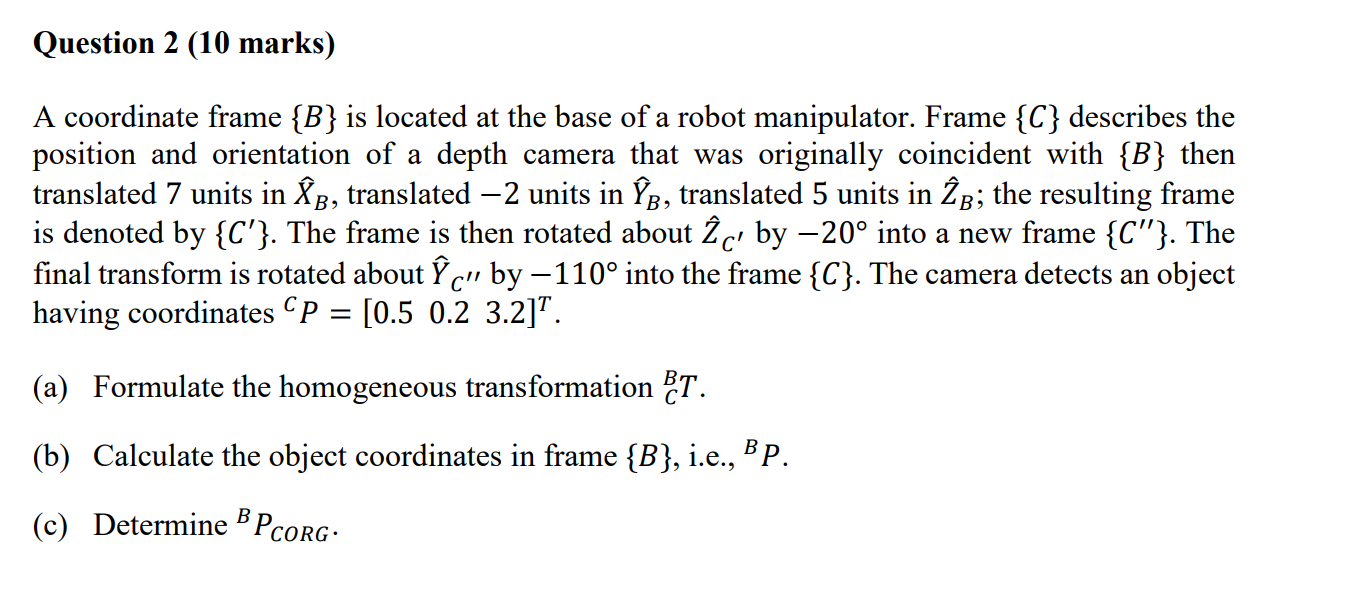
Question 2 shown below
I have attempt question 2a however incomplete. Need help to check if my solution for 2a is correct.
Need help to solve for 2b and 2c
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock