

Question: Question 3 (30 pts.) The frames assigned to the joints of a cylindrical robot (in home position) are shown below. di 23 Tos Y2 de
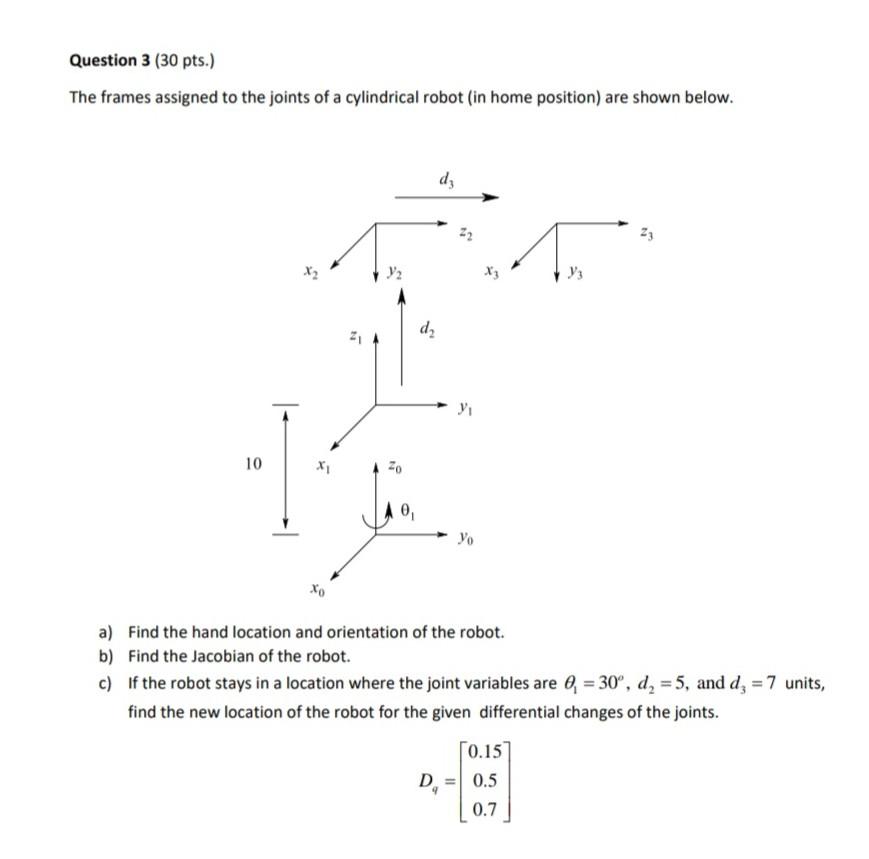
Question 3 (30 pts.) The frames assigned to the joints of a cylindrical robot (in home position) are shown below. di 23 Tos Y2 de 10 20 0 yo Xo a) Find the hand location and orientation of the robot. b) Find the Jacobian of the robot. c) If the robot stays in a location where the joint variables are 0 = 30, d, = 5, and d; = 7 units, find the new location of the robot for the given differential changes of the joints. [0.15 D, = 0.5 0.7 Question 3 (30 pts.) The frames assigned to the joints of a cylindrical robot (in home position) are shown below. di 23 Tos Y2 de 10 20 0 yo Xo a) Find the hand location and orientation of the robot. b) Find the Jacobian of the robot. c) If the robot stays in a location where the joint variables are 0 = 30, d, = 5, and d; = 7 units, find the new location of the robot for the given differential changes of the joints. [0.15 D, = 0.5 0.7
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts