

Question: Question about the Bayesian point-estimators, to be precise Posterior Mean proof: I wrote first a general idea as a reference then my question is at
Question about the Bayesian point-estimators, to be precise Posterior Mean proof:
I wrote first a general idea as a reference then my question is at bottom
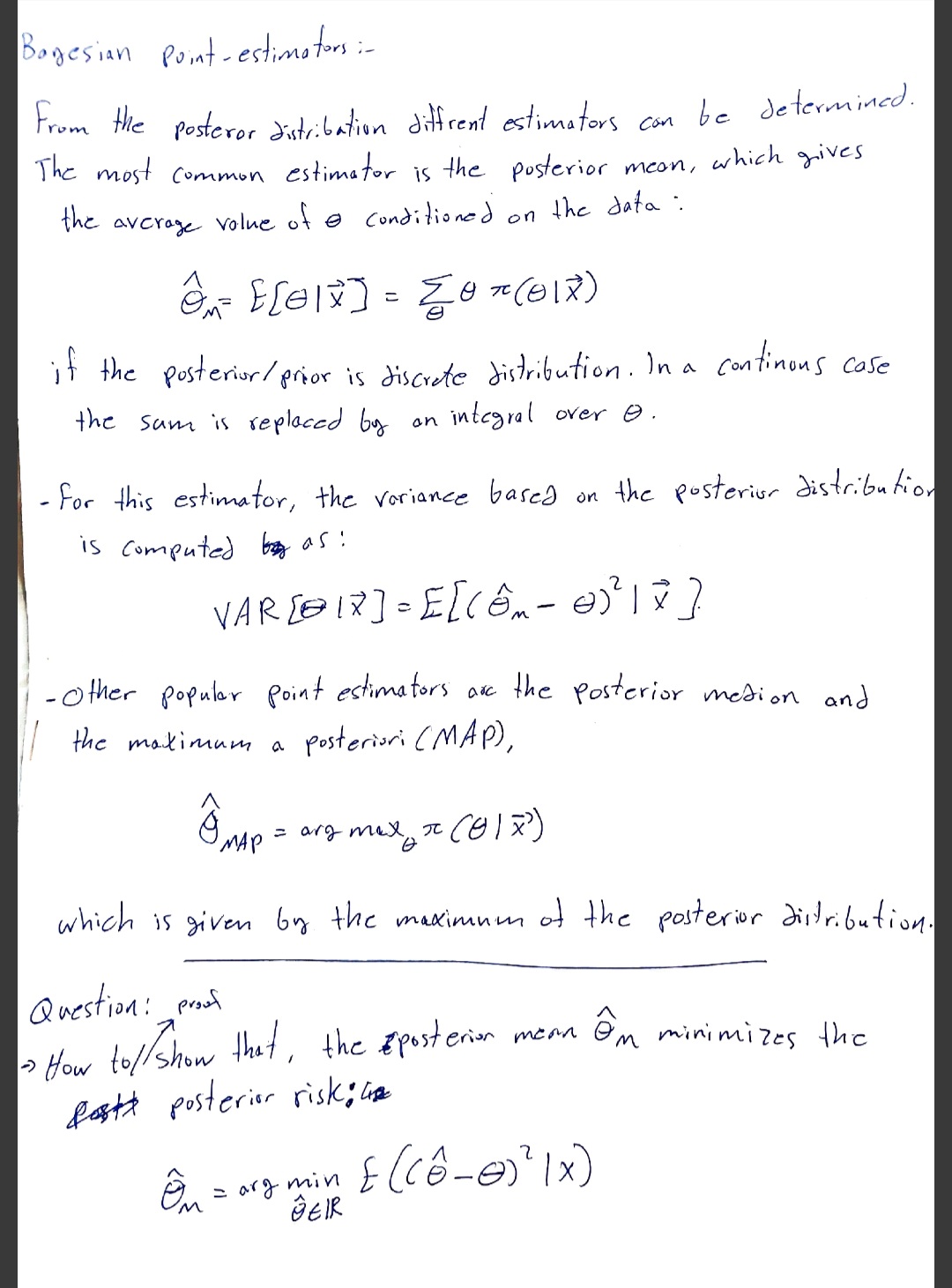
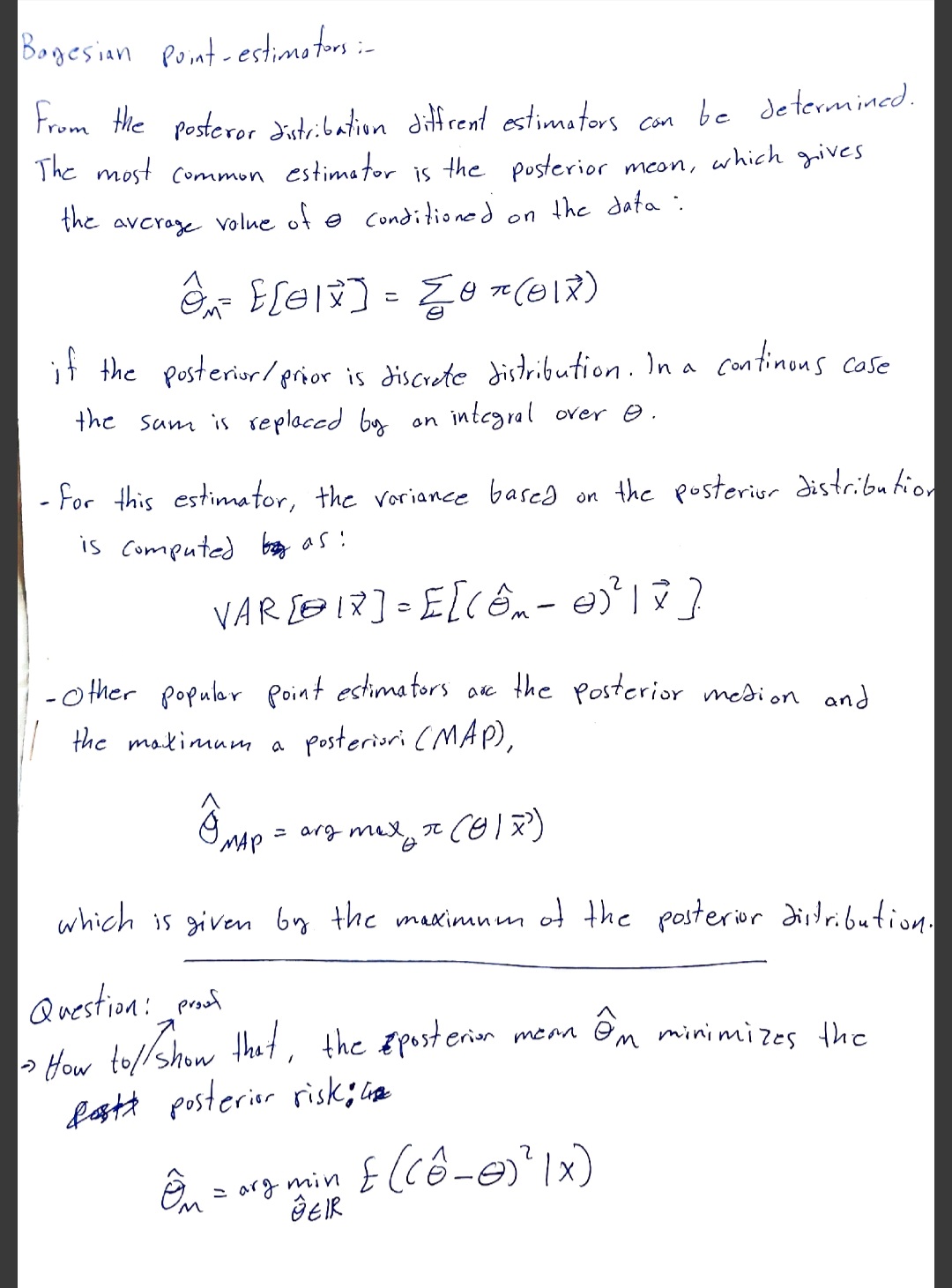
Bagesian Point- estimators :- From the posteror distribution diffrent estimators can be determined. The most common estimator is the posterior mean , which gives the average value of conditioned on the data . On = ELGIN ] = 0 * ( 01X ) if the posterior / prior is discrete distribution . In a continous case the sam is replaced by an integral over 9 - For this estimator , the variance based on the posterior distribution is computed gas ! VAR ED IX ] = E [ ( Em - 0 ) 2 1 x] - Other popular point estimators as the posterior motion and the maximum a posteriori ( MAP ), 8 MAP = arg max, to (01 x ' ) which is given by the maximum of the posterior distribution . Question : proof - How to// show that , the Eposterior mean On minimizes the R posterior risk; he GEIR On =arg min E ( ( 0 - 0 ) ? 1 x )
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts