

Question: question2 1. Extrinsic Matrix [1 point The rotation matrix R and the translation vector t of a camera are as follows: 0.1 0.5 0.3 R0.6
question2
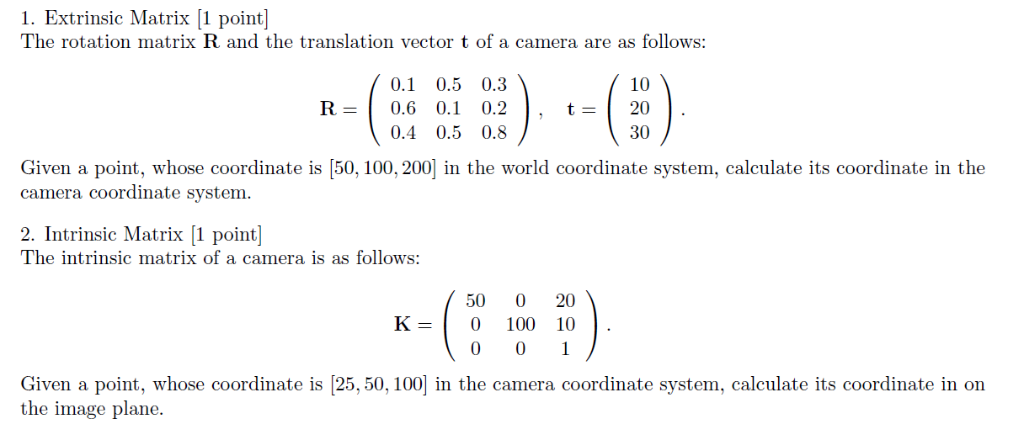
1. Extrinsic Matrix [1 point The rotation matrix R and the translation vector t of a camera are as follows: 0.1 0.5 0.3 R0.6 0.1 0.2 0.4 0.5 0.8 10 t20 30 Given a point, whose coordinate is [50, 100, 200] in the world coordinate system, calculate its coordinate in the camera coordinate system 2. Intrinsic Matrix [1 point The intrinsic matrix of a camera is as follows: 50 0 20 K-0 100 10 Given a point, whose coordinate is [25, 50, 100 in the camera coordinate system, calculate its coordinate in on the image plane
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock