

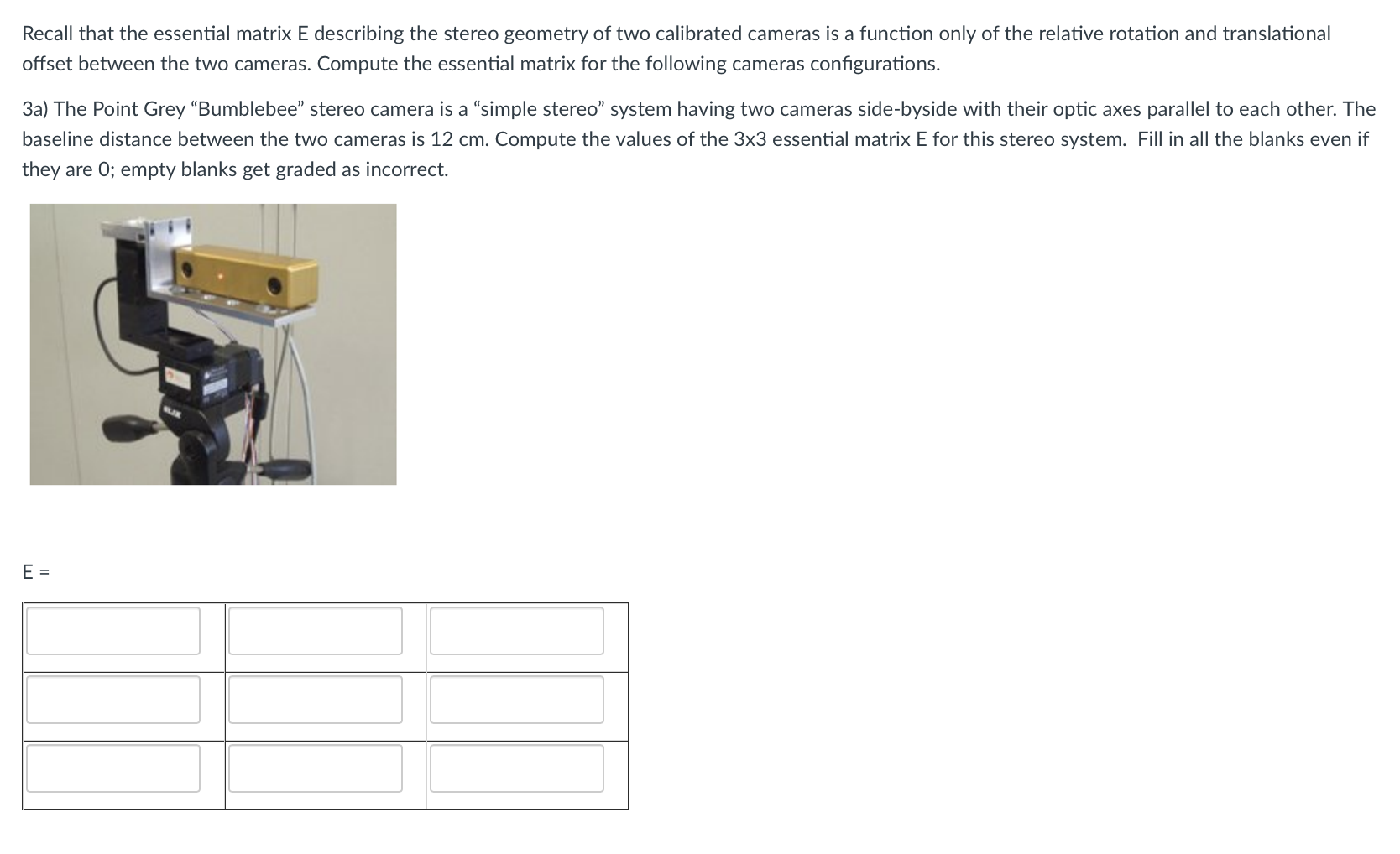
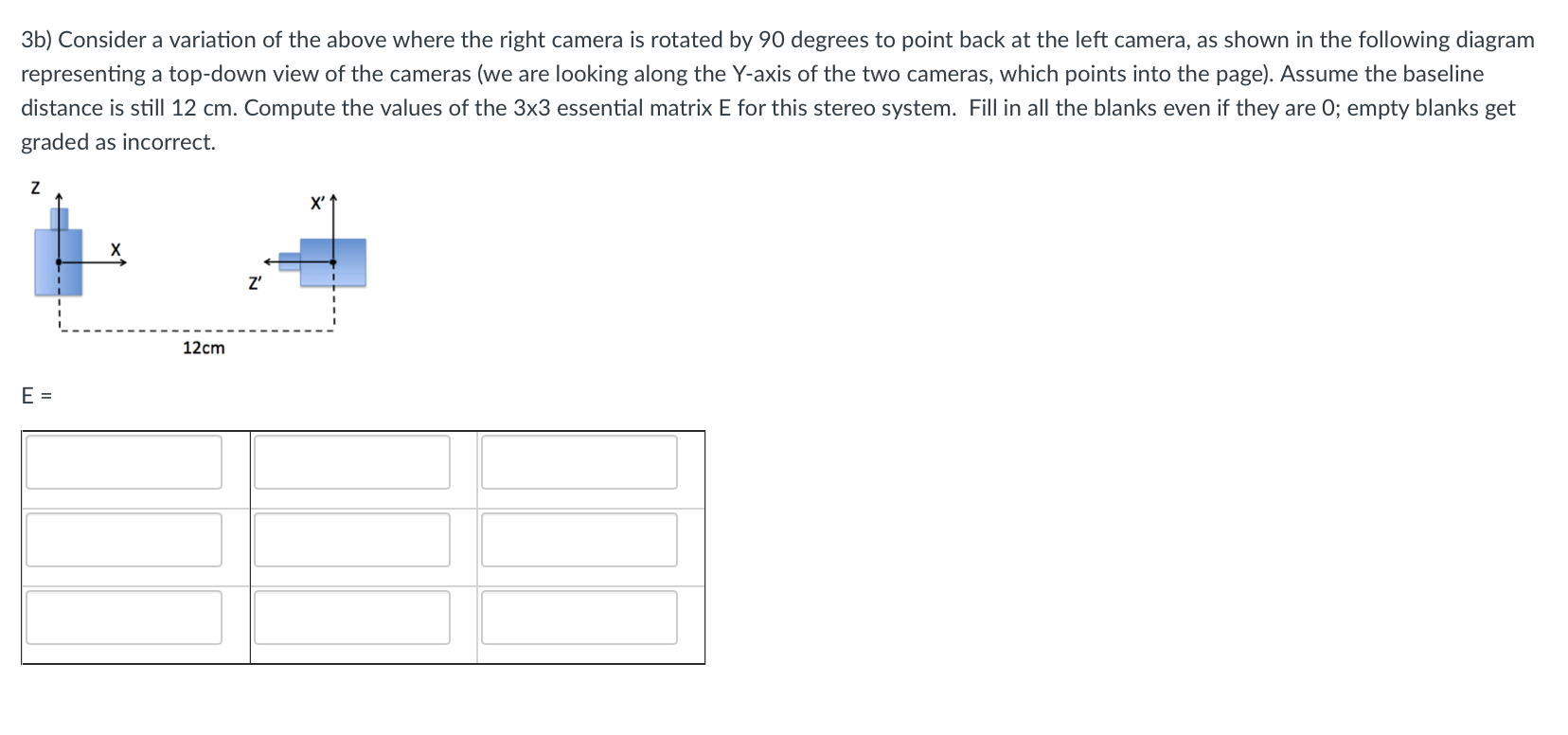
Question: Recall that the essential matrix E describing the stereo geometry of two calibrated cameras is a function only of the relative rotation and translational offset
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock