

Question: sketch jan13a #include byte servopin = 3 ; Servo servo; int minReverseSpeed =1450; int maxReverseSpeed =1100; int minforwardSpeed =1550; int maxporwardSpeed =1900; void setup() {
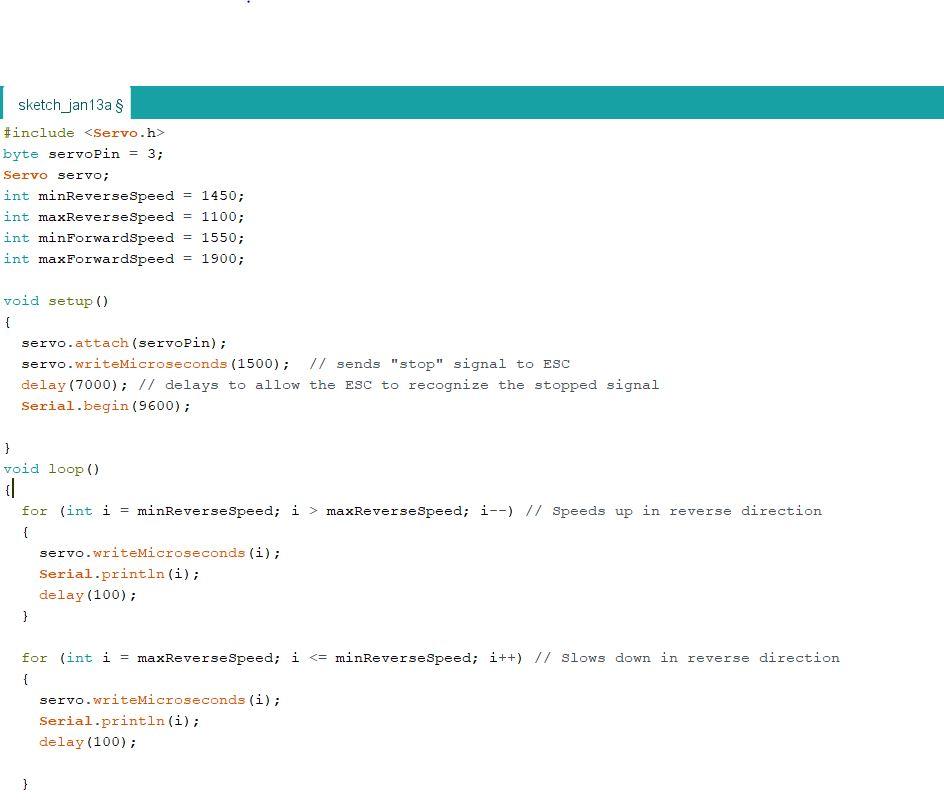
sketch jan13a \#include byte servopin = 3 ; Servo servo; int minReverseSpeed =1450; int maxReverseSpeed =1100; int minforwardSpeed =1550; int maxporwardSpeed =1900; void setup() \{ servo.attach (servopin); servo.writemicroseconds (1500); // sends "stop" signal to ESC delay 7000 ); // delays to allow the ESC to recognize the stopped signal Serial.begin(9600); 3 void loop() { for (int i= minReversespeed; i> maxReverseSpeed; i ) // Speeds up in reverse direction \{ servo.writemicroseconds (i); Serial.println(i); delay (100); \} for (int i= maxReversespeed; i i++ ) // Slows down in reverse direction f servo.writemicroseconds (i); Serial.println(i); delay(100); \}
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts