

Question: Step 2 Run IKinBodyIterates function and print a report The IKinBodylterates function prints out a report for each iteration of the Newton - Raphson process,
Step Run IKinBodyIterates function and print a report
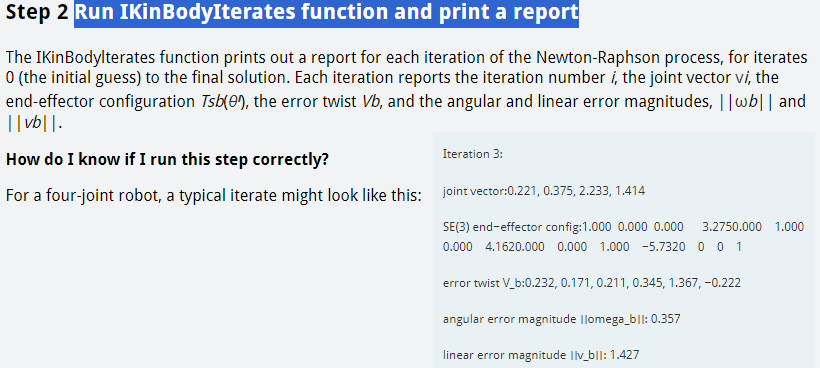
The IKinBodylterates function prints out a report for each iteration of the NewtonRaphson process, for iterates
the initial guess to the final solution. Each iteration reports the iteration number the joint vector the
endeffector configuration the error twist and the angular and linear error magnitudes, and
How do I know if I run this step correctly?
For a fourjoint robot, a typical iterate might look like this:
Iteration :
joint vector:
endeffector config:
error twist Vb:
angular error magnitude lomegab :
linear error magnitude lvbl:
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock