

Question: The easiest way to understand kinematics is by developing it on a 2 D robotic arm that contains two links, two joints and one end
The easiest way to understand kinematics is by developing it on a D robotic arm that contains two links, two joints and one endeffector or a gripper. The first
joint will rotate, but it is connected to a table or the floor by a foundation. While link connects it to a second joint that can translate and rotate, a second link
links this joint to the fixedend effector.
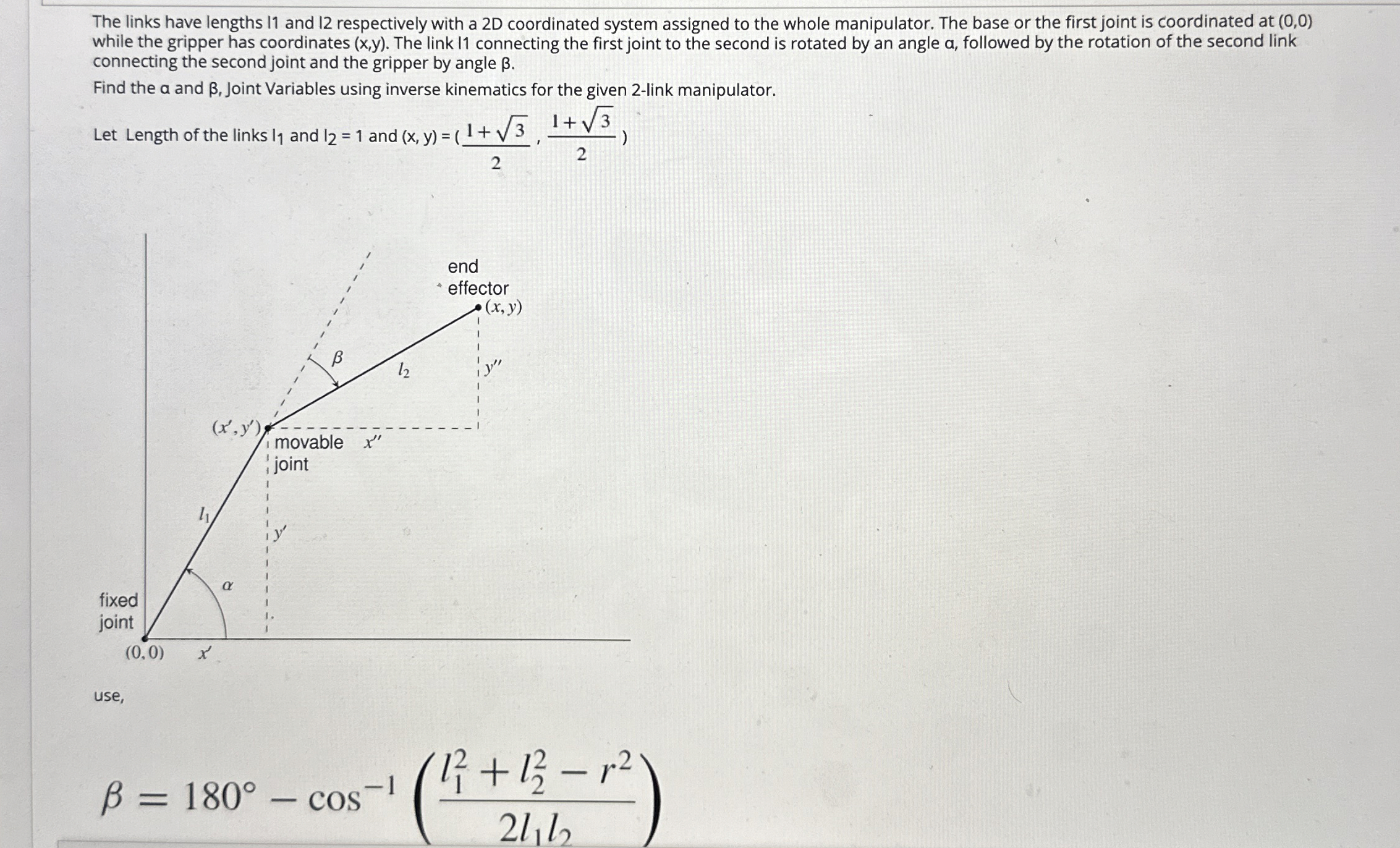
The links have lengths and respectively with a D coordinated system assigned to the whole manipulator. The base or the first joint is coordinated at
while the gripper has coordinates The link II connecting the first joint to the second is rotated by an angle a followed by the rotation of the second link
connecting the second joint and the gripper by angle
Find the a and Joint Variables using inverse kinematics for the given link manipulator.
Let Length of the links and and
The links have lengths and respectively with a D coordinated system assigned to the whole manipulator. The base or the first joint is coordinated at
while the gripper has coordinates The link connecting the first joint to the second is rotated by an angle followed by the rotation of the second link
connecting the second joint and the gripper by angle
Find the a and Joint Variables using inverse kinematics for the given link manipulator.
Let Length of the links and and
use,
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock