

Question: The figure below shows a planar parallel manipulator called a ?variable geometry truss?. Three actuated prismatic joints are used to control the position and orientation
The figure below shows a planar parallel manipulator called a ?variable geometry truss?. Three actuated prismatic joints are used to control the position and orientation of the platform. The revolute joints at the end of each link are passive. Assume that there are no actuator limits.
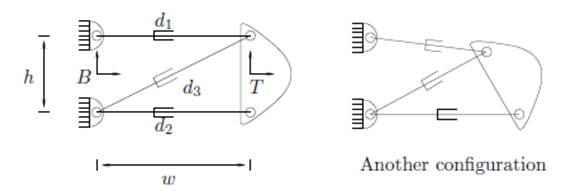
Use Gruebler?s formula to calculate the number of degrees of freedom of the mechanism.
h W d3 T Another configuration
Step by Step Solution
3.43 Rating (156 Votes )
There are 3 Steps involved in it
To determine the number of degrees of freedom DOF of the given planar parallel manipulator using Gru... View full answer

Get step-by-step solutions from verified subject matter experts