

Question: The following Bayesian network is for a simple obstacle avoidance system: Obstacle Sensor The robot using this system is on a mission in which the
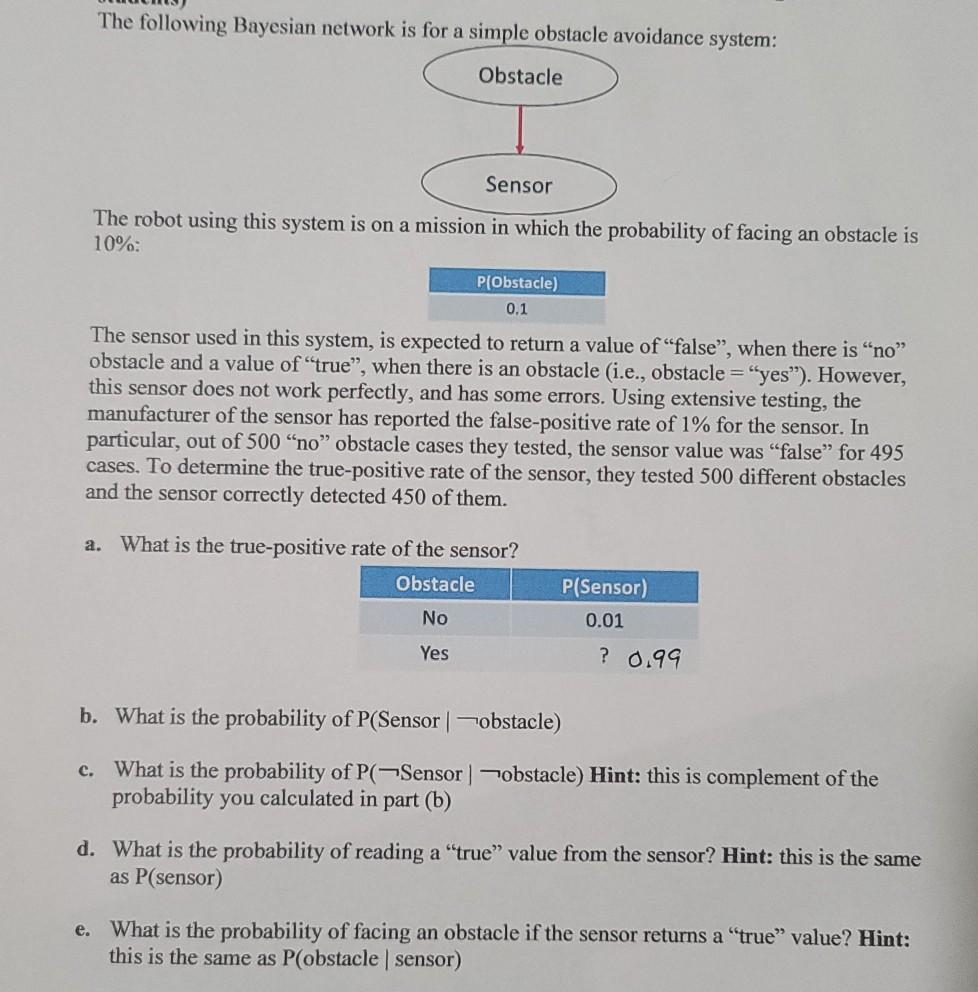
The following Bayesian network is for a simple obstacle avoidance system: Obstacle Sensor The robot using this system is on a mission in which the probability of facing an obstacle is 10% P(Obstacle) 0.1 The sensor used in this system, is expected to return a value of "false", when there is "no" obstacle and a value of "true", when there is an obstacle (i.e., obstacle="yes"). However, this sensor does not work perfectly, and has some errors. Using extensive testing, the manufacturer of the sensor has reported the false-positive rate of 1% for the sensor. In particular, out of 500"no" obstacle cases they tested, the sensor value was "false" for 495 cases. To determine the true-positive rate of the sensor, they tested 500 different obstacles and the sensor correctly detected 450 of them. a. What is the true-positive rate of the sensor? Obstacle P(Sensor) 0.01 No Yes ? 0.99 b. What is the probability of P(Sensor-obstacle) c. What is the probability of P(-Sensor obstacle) Hint: this is complement of the probability you calculated in part (b) d. What is the probability of reading a "true" value from the sensor? Hint: this is the same as P(sensor) e. What is the probability of facing an obstacle if the sensor returns a "true" value? Hint: this is the same as P(obstacle sensor)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts