

Question: The main challenge in motion planning is when a robot exists within a particular environment. The robot needs to plan a strategy to reach its
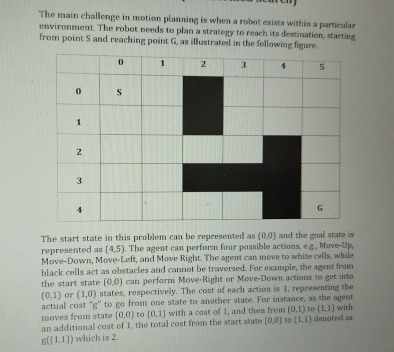
The main challenge in motion planning is when a robot exists within a particular environment. The robot needs to plan a strategy to reach its destination, starting, from point and reaching point as illustrated in the following figure.
table
The start state in this problem can be represented as and the goal state is represented as The agent can perforn four possible actions, eg MaveUp MoveDown, MoveLeft, and Move Right. The agent can move to white cells, while black cells act as obstacles and cannot be traversed. For example, the agent from the start state can perform MoveRight or MoveDown actions to get into or states, respectively. The cost of each action is representing the actual cost to go from one state to another state For instance, as the agest moves from state to with a cost of and then from to with an additional cost of the total cost from the start state to denoted as which is
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock