

Question: The system below is used to modulate the angular position of the foot of a transtibial prosthesis. The foot is connected to a hydraulic actuator
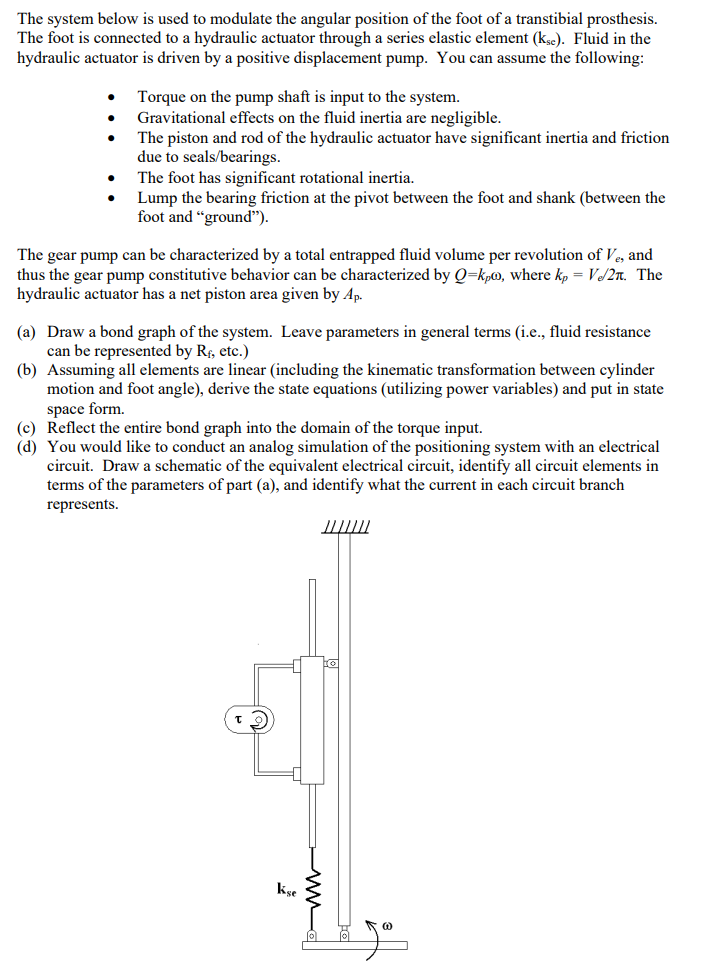
The system below is used to modulate the angular position of the foot of a transtibial prosthesis. The foot is connected to a hydraulic actuator through a series elastic element leftmathrmkmathrmscright Fluid in the hydraulic actuator is driven by a positive displacement pump. You can assume the following:
Torque on the pump shaft is input to the system.
Gravitational effects on the fluid inertia are negligible.
The piston and rod of the hydraulic actuator have significant inertia and friction due to sealsbearings
The foot has significant rotational inertia.
Lump the bearing friction at the pivot between the foot and shank between the foot and "ground"
The gear pump can be characterized by a total entrapped fluid volume per revolution of Ve and thus the gear pump constitutive behavior can be characterized by Qkpomega where kpVepi The hydraulic actuator has a net piston area given by Amathrmp
a Draw a bond graph of the system. Leave parameters in general terms ie fluid resistance can be represented by mathrmRmathrmf etc.
b Assuming all elements are linear including the kinematic transformation between cylinder motion and foot angle derive the state equations utilizing power variables and put in state space form.
c Reflect the entire bond graph into the domain of the torque input.
d You would like to conduct an analog simulation of the positioning system with an electrical circuit. Draw a schematic of the equivalent electrical circuit, identify all circuit elements in terms of the parameters of part a and identify what the current in each circuit branch represents.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock