

Question: The two link, pin - jointed ( O , B ) , 1 DOF mechanism shown is operated in a horizontal plane with link (
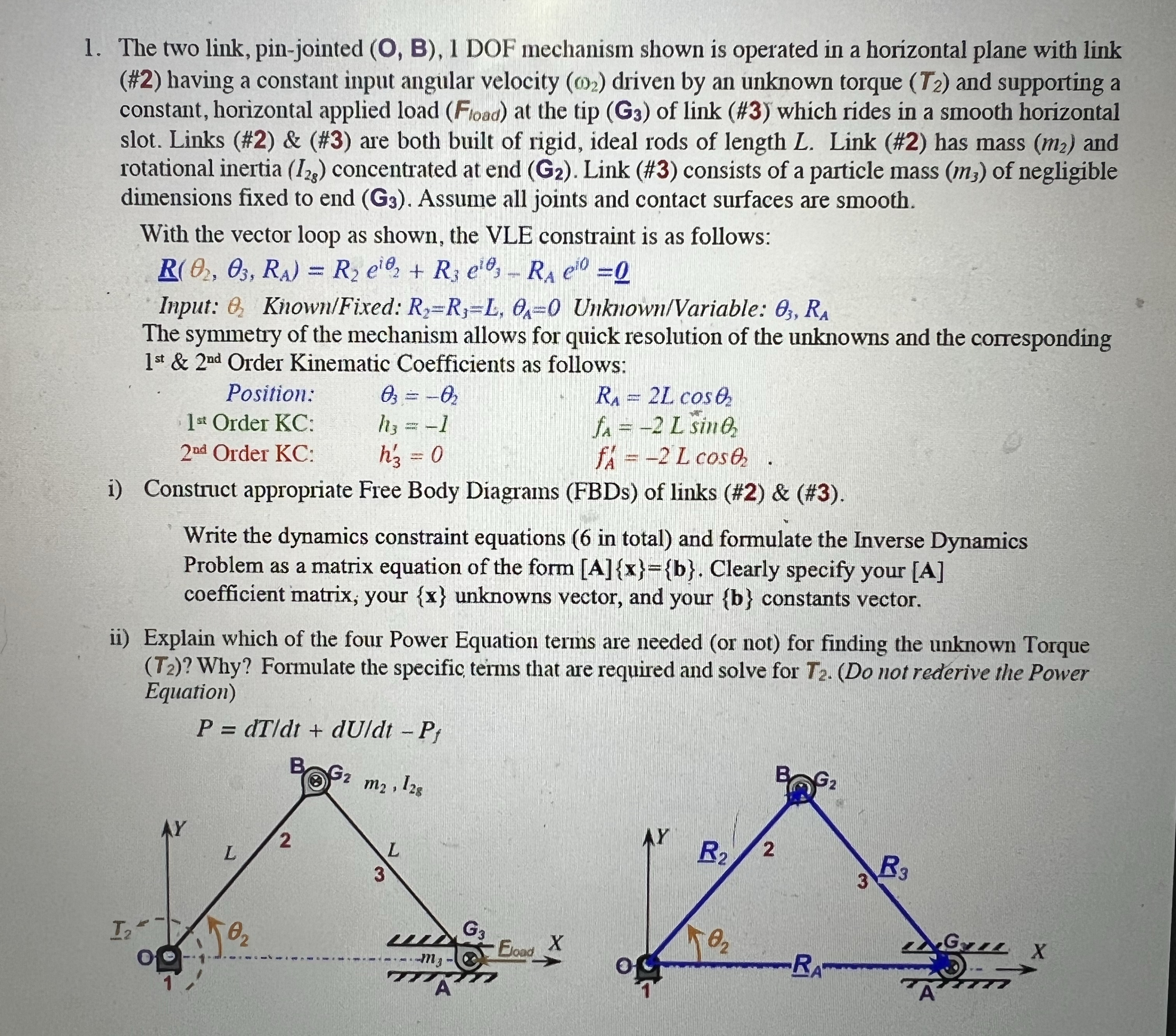
The two link, pinjointed O B DOF mechanism shown is operated in a horizontal plane with link # having a constant input angular velocity driven by an unknown torque and supporting a constant, horizontal applied load at the tip of link # which rides in a smooth horizontal slot. Links # & # are both built of rigid, ideal rods of length L Link # has mass and rotational inertia concentrated at end Link # consists of a particle mass of negligible dimensions fixed to end Assume all joints and contact surfaces are smooth.
With the vector loop as shown, the VLE constraint is as follows:
Input: KnownFixed: UnknownVariable:
The symmetry of the mechanism allows for quick resolution of the unknowns and the corresponding & Order Kinematic Coefficients as follows:
Position:
Lcos
Lsin
Lcos
Order :
Order :
i Construct appropriate Free Body Diagrams FBDs of links # & #
Write the dynamics constraint equations in total and formulate the Inverse Dynamics Problem as a matrix equation of the form Clearly specify your A coefficient matrix, your unknowns vector, and your constants vector.
ii Explain which of the four Power Equation terms are needed or not for finding the unknown Torque Why? Formulate the specific, terms that are required and solve for Do not rederive the Power Equation
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock