

Question: The workspace for SCARA robot is a . b . Internal state sensors are used for measuring a . position & acceleration b . position
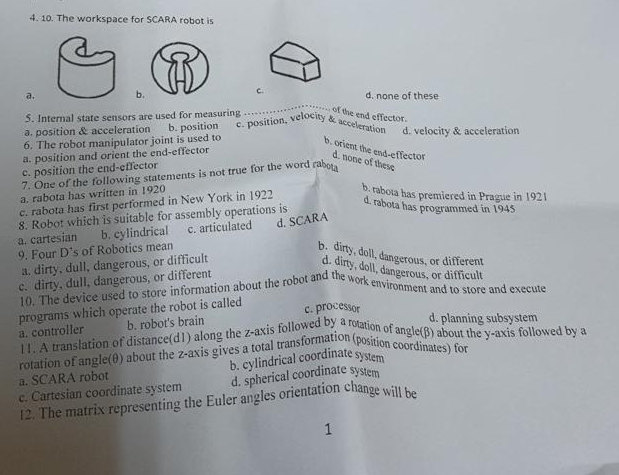
The workspace for SCARA robot is
a
b
Internal state sensors are used for measuring
a position & acceleration
b position
The robot manipulator joint is used to
a position and orient the endeffector
c position the endcffector
c
d none of these
One of the following statements is not true for the word rabota
a rabota has written in
c rabota has first performed in New York in
c position, velocity & acceleration d
d velocity & acceleration
Robot which is suitable for assembly operations is
b Orient the endeffector
d none of these
a cartesian
b cylindrical
c articulated
d SCARA
b tabota has premiered in Prague in
d rabota has programmed in
Four Ds of Robotics mean
a dirty, dall, dangerous, or difficult
b dirfy, doll, dangerous, or different
c dirty, dull, dangerous, or different
d dirty, doll, dangerous, or difficult
The device used to store in formation about the robot and the work environment and to store and execute programs which operate the robot is called
c processor
d planning subsystem
a controller
b robot's brain
A translation of distance along the axis followed by a rotation of angle about the axis followed by a rotation of angle about the axis gives a total transformation position coordinates for
a SCARA robot
b cylindrical coordinate system
c Cartestan coordinate system
d spherical coordinate system
The matrix representing the Euler angles orientation change will be
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock