

Question: Trajectory tracking using an open loop controller In this problem, first we will generate a trajectory using the differential flatness technique. Then, we will generate
Trajectory tracking using an open loop controller
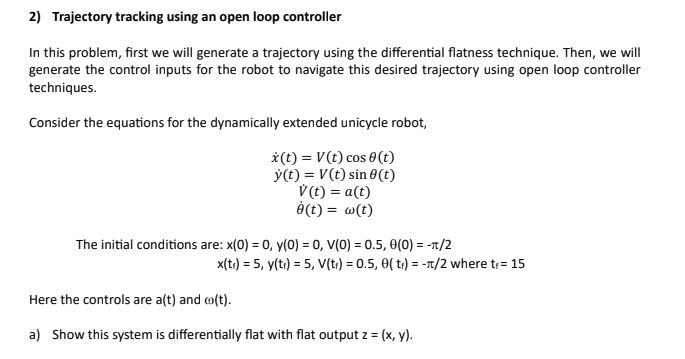
In this problem, first we will generate a trajectory using the differential flatness technique. Then, we will generate the control inputs for the robot to navigate this desired trajectory using open loop controller techniques.
Consider the equations for the dynamically extended unicycle robot,
The initial conditions are:
where
Here the controls are and
a Show this system is differentially flat with flat output
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock