

Question: Using Matlab Implement a state machine to perform behavior based navigation. The state machine must include at least 3 behaviors. Go to goal, obstacle avoidance,
Using Matlab
Implement a state machine to perform behavior based navigation. The state machine must include at least 3 behaviors. Go to goal, obstacle avoidance, and boundary following. You must demonstrate its functioning in an environment such as the one illustrated in Fig. 1. The robot is to be equipped with a laser range sensor covering 180 degrees and made up of 4 beams (one every 45 deg).
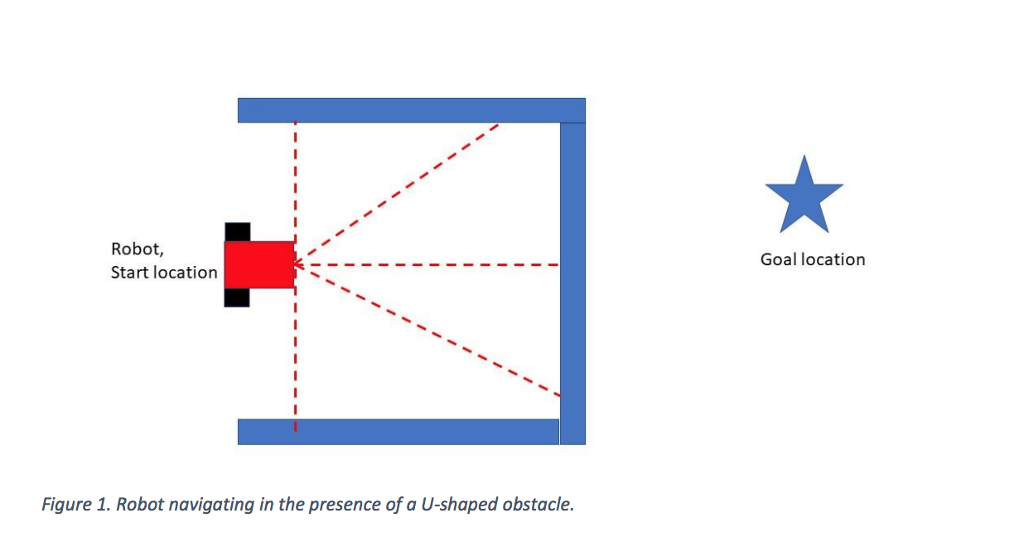
Robot, Start location Goal location Figure 1. Robot navigating in the presence of a U-shaped obstacle. Robot, Start location Goal location Figure 1. Robot navigating in the presence of a U-shaped obstacle
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock