

Question: Using MATLAB: Write functions that given a rotation matrix R E SO(3) returns: a. Its equivalent axis-angle representation. b. Quaternion representation. c. ZYZ and roll-pitch-yaw
Using MATLAB:
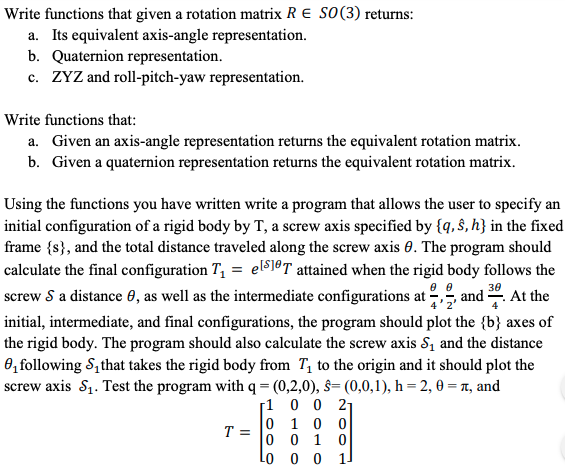
Write functions that given a rotation matrix R E SO(3) returns: a. Its equivalent axis-angle representation. b. Quaternion representation. c. ZYZ and roll-pitch-yaw representation. Write functions that: a. Given an axis-angle representation returns the equivalent rotation matrix. b. Given a quaternion representation returns the equivalent rotation matrix. Using the functions you have written write a program that allows the user to specify an initial configuration of a rigid body by T, a screw axis specified by {q, $, h} in the fixed frame (s), and the total distance traveled along the screw axis 8. The program should calculate the final configuration T1 = elsj@T attained when the rigid body follows the screw S a distance 0, as well as the intermediate configurations at, and At the initial, intermediate, and final configurations, the program should plot the {b} axes of the rigid body. The program should also calculate the screw axis S, and the distance following that takes the rigid body from Ty to the origin and it should plot the screw axis Sz. Test the program with q = (0,2,0), $=(0,0,1), h = 2, 0 = 1, and 11 0021 1 0 0 T = O 0 1 0 1 LO 0 0 11 Write functions that given a rotation matrix R E SO(3) returns: a. Its equivalent axis-angle representation. b. Quaternion representation. c. ZYZ and roll-pitch-yaw representation. Write functions that: a. Given an axis-angle representation returns the equivalent rotation matrix. b. Given a quaternion representation returns the equivalent rotation matrix. Using the functions you have written write a program that allows the user to specify an initial configuration of a rigid body by T, a screw axis specified by {q, $, h} in the fixed frame (s), and the total distance traveled along the screw axis 8. The program should calculate the final configuration T1 = elsj@T attained when the rigid body follows the screw S a distance 0, as well as the intermediate configurations at, and At the initial, intermediate, and final configurations, the program should plot the {b} axes of the rigid body. The program should also calculate the screw axis S, and the distance following that takes the rigid body from Ty to the origin and it should plot the screw axis Sz. Test the program with q = (0,2,0), $=(0,0,1), h = 2, 0 = 1, and 11 0021 1 0 0 T = O 0 1 0 1 LO 0 0 11
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts