

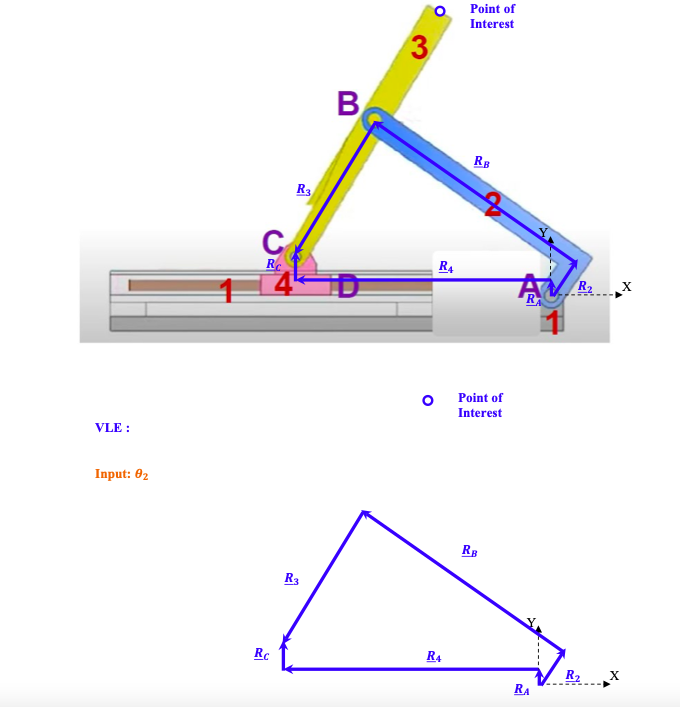
Question: Using the skeletal diagram and vector loops provided, formulate the VLE ( s ) that describe the mechanisms. List the known / knowable values etc.
Using the skeletal diagram and vector loops provided, formulate the VLEs that describe the
mechanisms.
List the knownknowable values etc. and the unknowns. For unknown angles, draw
how those angles are measured ie CCW from a specified reference axis
Using those VLE develop the equations and terms needed to resolve all the kinematic
parameters and completely characterize the position solution for these mechanisms. In other
words, do the prep work for your semester project and practice on the other mechanisms.
Your submission should show the work undertaken to identify the Jacobian J unknowns vector
vec and the right hand side, vec ie
vec
and you must expand this compact notation to show each term of every matrixvector
Add a vector loop to locate the Point of Interest indicated. Write a constraint equation
corresponding to your vector loop.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock