

Question: Wall Following with PID Controller Your objective is to implement a PID controller to follow walls in an environment. Notes: The robot you should use
Wall Following with PID Controller
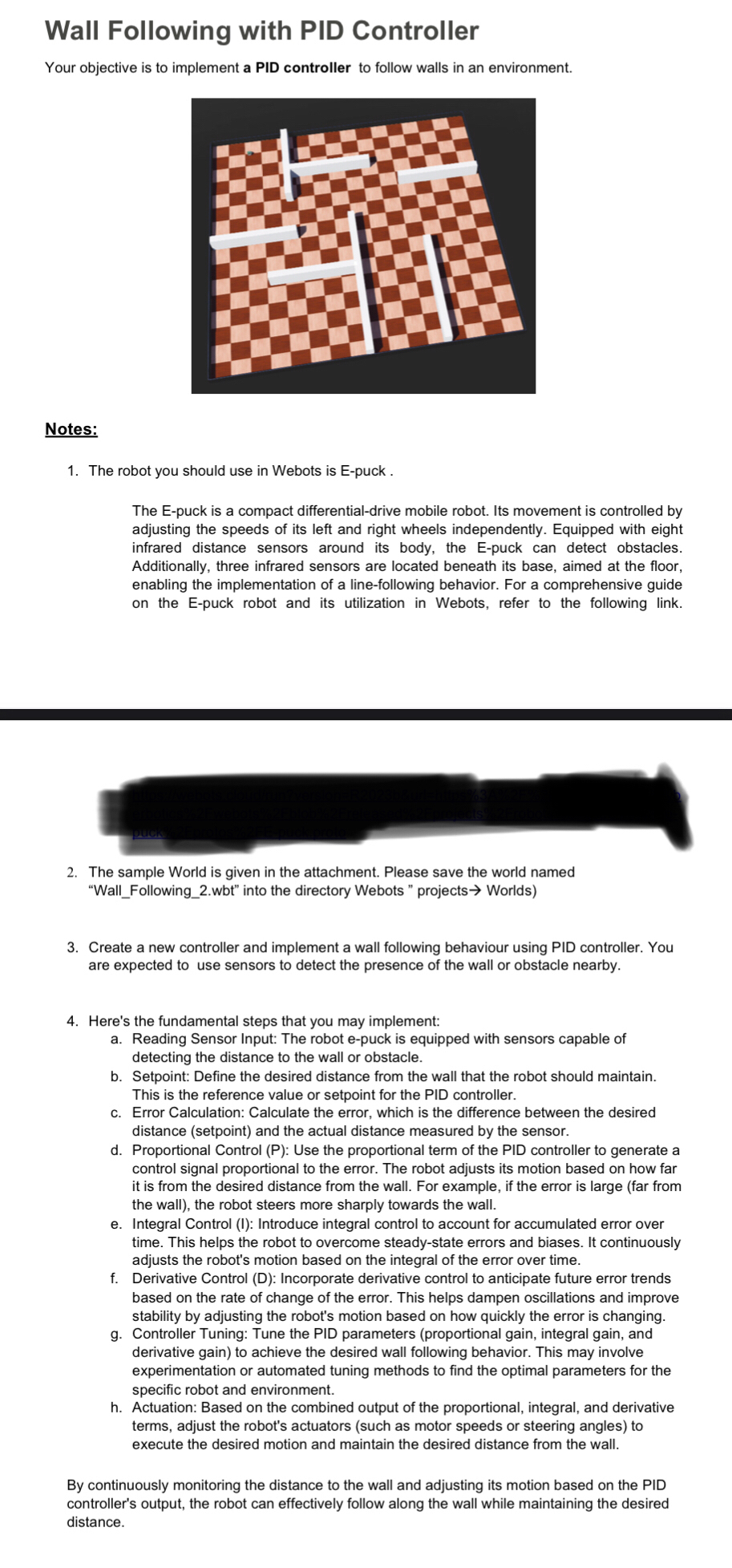
Your objective is to implement a PID controller to follow walls in an environment.
Notes:
The robot you should use in Webots is Epuck
The Epuck is a compact differentialdrive mobile robot. Its movement is controlled by adjusting the speeds of its left and right wheels independently. Equipped with eight infrared distance sensors around its body, the Epuck can detect obstacles. Additionally, three infrared sensors are located beneath its base, aimed at the floor, enabling the implementation of a linefollowing behavior. For a comprehensive guide on the Epuck robot and its utilization in Webots, refer to the following link.
The sample World is given in the attachment. Please save the world named "WallFollowingwbt into the directory Webots projects Worlds
Create a new controller and implement a wall following behaviour using PID controller. You are expected to use sensors to detect the presence of the wall or obstacle nearby.
Here's the fundamental steps that you may implement:
a Reading Sensor Input: The robot epuck is equipped with sensors capable of detecting the distance to the wall or obstacle.
b Setpoint: Define the desired distance from the wall that the robot should maintain. This is the reference value or setpoint for the PID controller.
c Error Calculation: Calculate the error, which is the difference between the desired distance setpoint and the actual distance measured by the sensor
d Proportional Control P: Use the proportional term of the PID controller to generate a control signal proportional to the error. The robot adjusts its motion based on how far it is from the desired distance from the wall. For example, if the error is large far from the wall the robot steers more sharply towards the wall.
e Integral Control I: Introduce integral control to account for accumulated error over time. This helps the robot to overcome steadystate errors and biases. It continuously adjusts the robot's motion based on the integral of the error over time.
f Derivative Control D: Incorporate derivative control to anticipate future error trends based on the rate of change of the error. This helps dampen oscillations and improve stability by adjusting the robot's motion based on how quickly the error is changing.
g Controller Tuning: Tune the PID parameters proportional gain, integral gain, and derivative gain to achieve the desired wall following behavior. This may involve experimentation or automated tuning methods to find the optimal parameters for the specific robot and environment.
h Actuation: Based on the combined output of the proportional, integral, and derivative terms, adjust the robot's actuators such as motor speeds or steering angles to execute the desired motion and maintain the desired distance from the wall.
By continuously monitoring the distance to the wall and adjusting its motion based on the PID controller's output, the robot can effectively follow along the wall while maintaining the desired distance.
I WANT THE COMPLETE CODE AND IT SHOULD BE WORKING
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock