

Question: We consider a simplified version of an oscillating system, namely, the pendulum in Graves et al (2022) and Graves and Zhu (2022). In particular, we
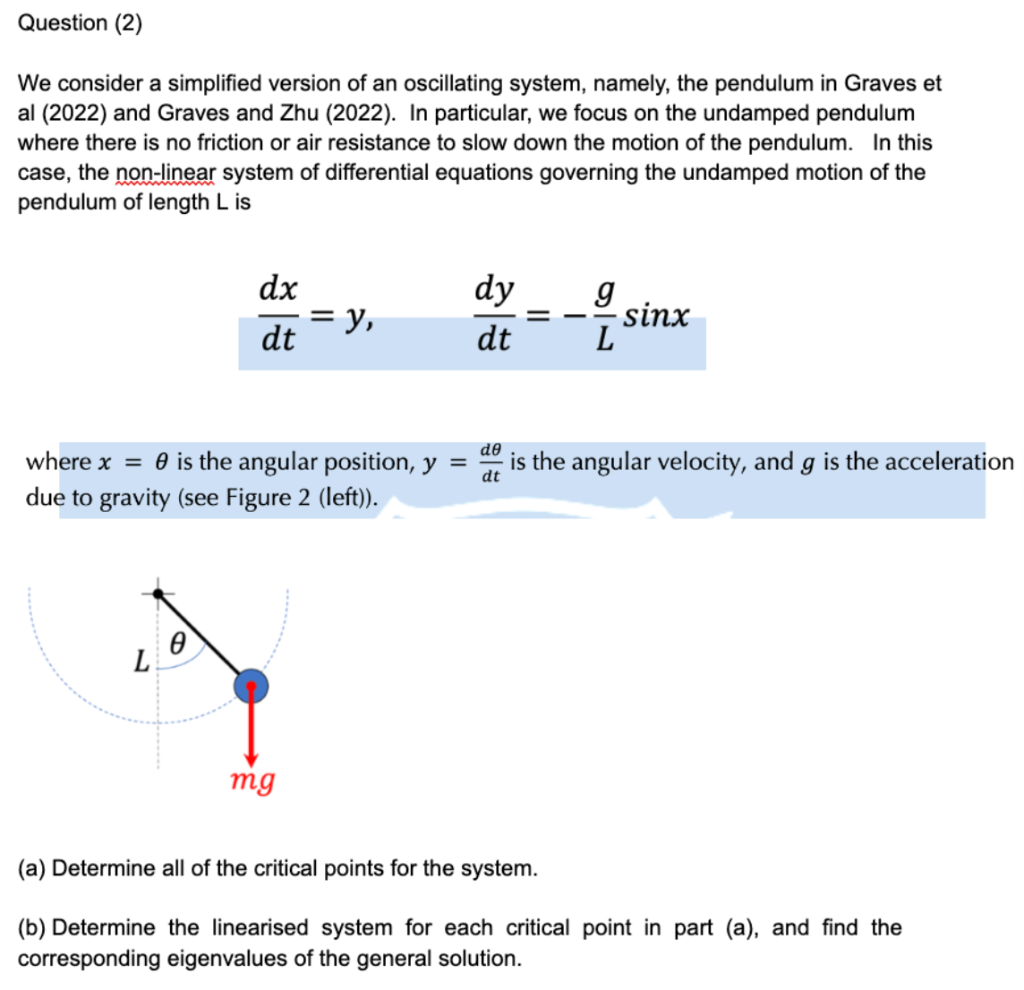
We consider a simplified version of an oscillating system, namely, the pendulum in Graves et al (2022) and Graves and Zhu (2022). In particular, we focus on the undamped pendulum where there is no friction or air resistance to slow down the motion of the pendulum. In this case, the non-linear system of differential equations governing the undamped motion of the pendulum of length L is dtdx=y,dtdy=Lgsinx where x= is the angular position, y=dtd is the angular velocity, and g is the acceleration due to gravity (see Figure 2 (left)). (a) Determine all of the critical points for the system. (b) Determine the linearised system for each critical point in part (a), and find the corresponding eigenvalues of the general solution. d) Set Lg=1 and use MATLAB or any other plotter to sketch the global phase portrait of the non-linear system in a region that includes the critical points at the origin and (,0). Given initial values (x0,y0)=(x(0),y(0)), provide a physical interpretation of the orbits by describing the corresponding oscillations for the case: i. where x0 and y0 are both small; ii. where x0 and y0 are both just large enough to almost reach the top; iii. where x0 and y0 are large enough to swing over the top. Clearly relate your interpretation to the orbits in the phase portrait
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts