

Question: When all obstacles are convex polygons we can improve the shortest path algorithm by only considering common tangents rather than all visibility edges. a .
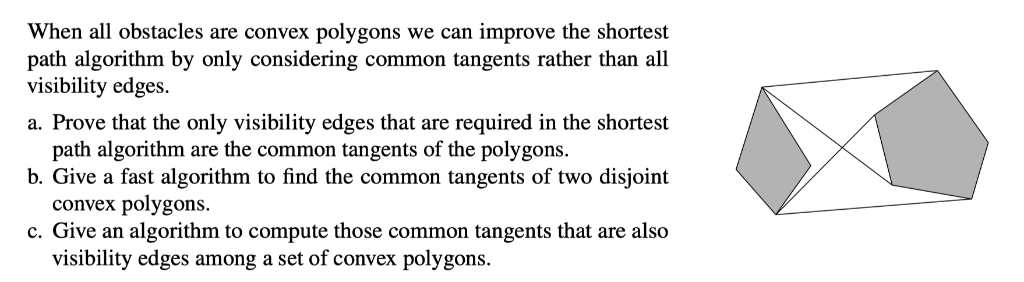
When all obstacles are convex polygons we can improve the shortest
path algorithm by only considering common tangents rather than all
visibility edges.
a Prove that the only visibility edges that are required in the shortest
path algorithm are the common tangents of the polygons.
b Give a fast algorithm to find the common tangents of two disjoint
convex polygons.
c Give an algorithm to compute those common tangents that are also
visibility edges among a set of convex polygons.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock