

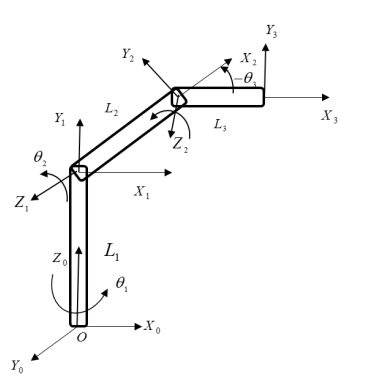
Question: When L 1 = 0 . 6 6 L 2 = 0 . 4 3 L 3 = 0 . 4 3 Solve Foward Kinematic
When L L L
Solve Foward Kinematic & Inverse Kinematics using Jacobian matrix
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock