

Question: where Ap =[Ax,,, Ay, Aal is linear and angular displacements of the hip, and the elements of the stiffness matrix,k, k,, k, are appropriate
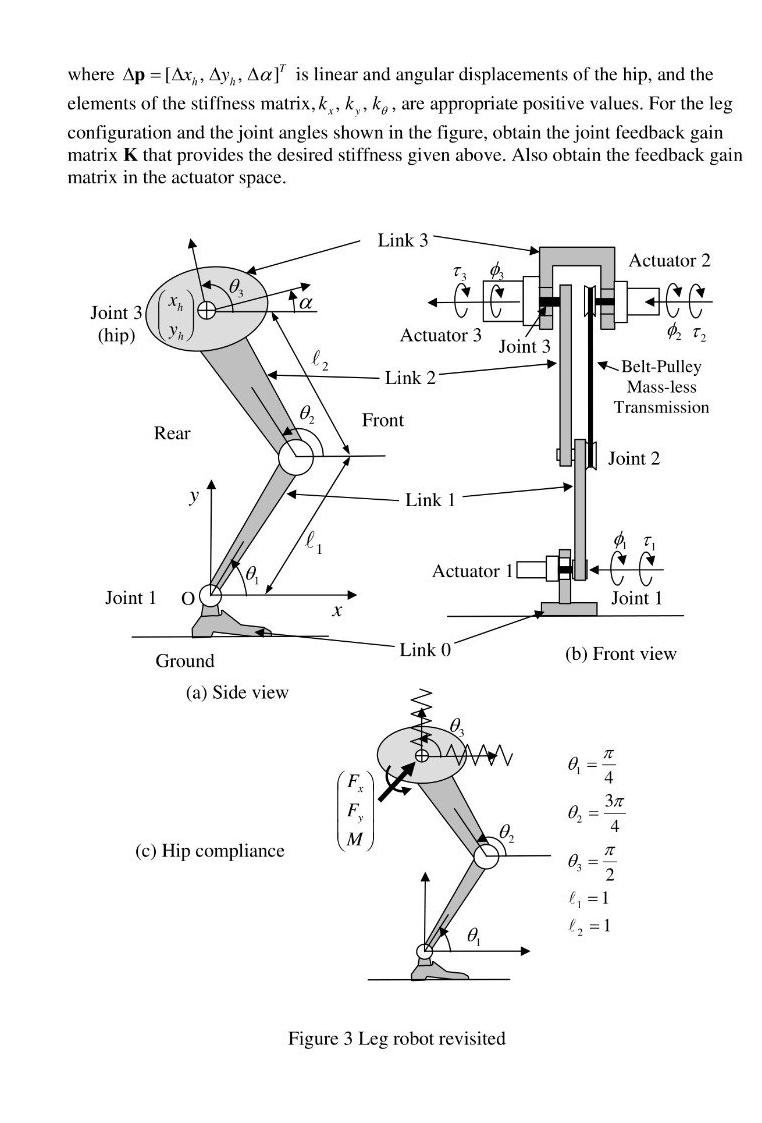
where Ap =[Ax,,, Ay, Aal is linear and angular displacements of the hip, and the elements of the stiffness matrix,k, k,, k, are appropriate positive values. For the leg configuration and the joint angles shown in the figure, obtain the joint feedback gain matrix K that provides the desired stiffness given above. Also obtain the feedback gain matrix in the actuator space. Joint 3( (hip) Yh Rear Joint 1 O Ground (a) Side view (c) Hip compliance Link 3 + Actuator 3 Link 21 Front Tz Pr 21 ~ V Link 1 Link 0 Joint 3 Actuator 1 Figure 3 Leg robot revisited 0 = 0 = 0 = (b) Front view Joint 2 T 4 U Joint 1 G $27 Belt-Pulley Mass-less Transmission Actuator 2 l = 1 l = 1 4 2
Step by Step Solution
3.54 Rating (158 Votes )
There are 3 Steps involved in it
Answer To solve this problem numerically we need to have the specific values of the joint angles and ... View full answer

Get step-by-step solutions from verified subject matter experts