

Question: x = -0.318a + 46.7q+4 + 9 + 0.2528 4 = -0.0127a -0.3269 +0.02238 h = -36.74 (3.1) (3.2) (3.3) e(s) 8(s) for A=0 a.
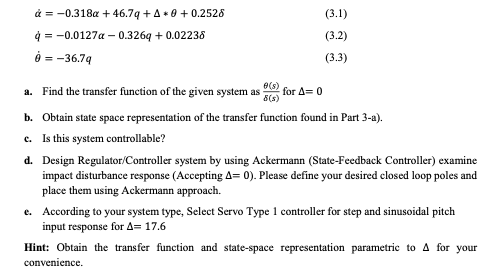
x = -0.318a + 46.7q+4 + 9 + 0.2528 4 = -0.0127a -0.3269 +0.02238 h = -36.74 (3.1) (3.2) (3.3) e(s) 8(s) for A=0 a. Find the transfer function of the given system as b. Obtain state space representation of the transfer function found in Part 3-a). c. Is this system controllable? d. Design Regulator/Controller system by using Ackermann (State-Feedback Controller) examine impact disturbance response (Accepting A=0). Please define your desired closed loop poles and place them using Ackermann approach. e. According to your system type, Select Servo Type 1 controller for step and sinusoidal pitch input response for A= 17.6 Hint: Obtain the transfer function and state-space representation parametric to A for your convenience. x = -0.318a + 46.7q+4 + 9 + 0.2528 4 = -0.0127a -0.3269 +0.02238 h = -36.74 (3.1) (3.2) (3.3) e(s) 8(s) for A=0 a. Find the transfer function of the given system as b. Obtain state space representation of the transfer function found in Part 3-a). c. Is this system controllable? d. Design Regulator/Controller system by using Ackermann (State-Feedback Controller) examine impact disturbance response (Accepting A=0). Please define your desired closed loop poles and place them using Ackermann approach. e. According to your system type, Select Servo Type 1 controller for step and sinusoidal pitch input response for A= 17.6 Hint: Obtain the transfer function and state-space representation parametric to A for your convenience
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts