

Question: You don't need to solve problem 1. I just need to know how to make a quantitative argument about two star trackers. 1. Work through,
You don't need to solve problem 1. I just need to know how to make a quantitative argument about two star trackers.
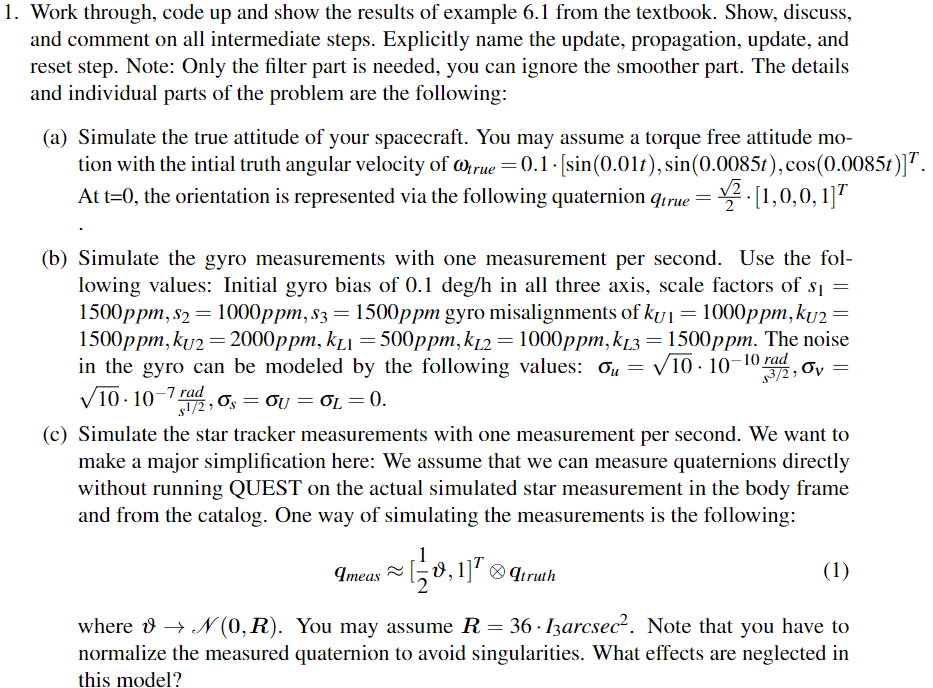

1. Work through, code up and show the results of example 6.1 from the textbook. Show, discuss, and comment on all intermediate steps. Explicitly name the update, propagation, update, and reset step. Note: Only the filter part is needed, you can ignore the smoother part. The details and individual parts of the problem are the following: (a) Simulate the true attitude of your spacecraft. You may assume a torque free attitude mo- tion with the intial truth angular velocity of @true = 0.1 . [sin(0.01t), sin(0.0085t), cos(0.0085t ) ]T. At t=0, the orientation is represented via the following quaternion qtrue = 12 . [1, 0,0, 1]] (b) Simulate the gyro measurements with one measurement per second. Use the fol- lowing values: Initial gyro bias of 0.1 deg/h in all three axis, scale factors of $1 = 1500ppm, $2 = 1000ppm, $3 = 1500ppm gyro misalignments of ku1 = 1000ppm, kuz = 1500ppm, ku2 = 2000ppm, kLI = 500ppm, kL2 = 1000ppm, k13 = 1500ppm. The noise in the gyro can be modeled by the following values: Ou = V10 . 10-10rad, ov = V10 . 10-7 rad $1/2 ; 's = OU = OL =0. (c) Simulate the star tracker measurements with one measurement per second. We want to make a major simplification here: We assume that we can measure quaternions directly without running QUEST on the actual simulated star measurement in the body frame and from the catalog. One way of simulating the measurements is the following: 9meas ~ [0, 1] & qtruth (1) where v - N(0, R). You may assume R = 36 . Iarcsec. Note that you have to normalize the measured quaternion to avoid singularities. What effects are neglected in this model?Show or make a quantitative argument that having two star trackers, oriented orthogonally to each other with their respective boresight and roll errors when taken together can lead to a model simulat to the one discussed in lo)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts