

Question: You have the agent program for simple reflex agent as shown below function REFLEX-VACUUM-AGENT([location,status]) returns an action if status = Dirty then return S uck
![below function REFLEX-VACUUM-AGENT([location,status]) returns an action if status = Dirty then return](https://s3.amazonaws.com/si.experts.images/answers/2024/09/66e2a38a86f94_03466e2a38a2a719.jpg)
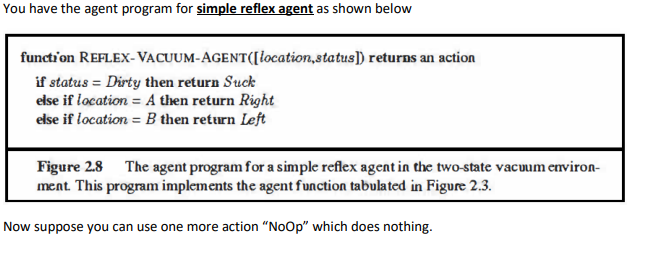
You have the agent program for simple reflex agent as shown below function REFLEX-VACUUM-AGENT([location,status]) returns an action if status = Dirty then return S uck eise if location =A then return Right else if location =B then return left Figure 2.8 The agent program for a simple reflex agent in the two-state vacuum environment. This program implements the agent function tabulated in Figure 2.3. Now suppose you can use one more action "NoOp" which does nothing. a. Would it be desirable to use this action in this agent program to prevent vacuum cleaner from moving after all squares are cleaned? If yes, modify the simple reflex agent program adding "NoOp" action and if not give an argument that despite the option of "NoOp" the agent is bound to keep moving. [4] b. If you have a choice of using other type of agents, which one would you choose and how would it prevent vacuum from moving after all squares are cleaned? [3]
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts