

Question: You need python and numpy. Code answers only. velocity_vectors There are three inputs, in this order: - the 1D 3-component velocity vector for the base
 You need python and numpy. Code answers only.
You need python and numpy. Code answers only.
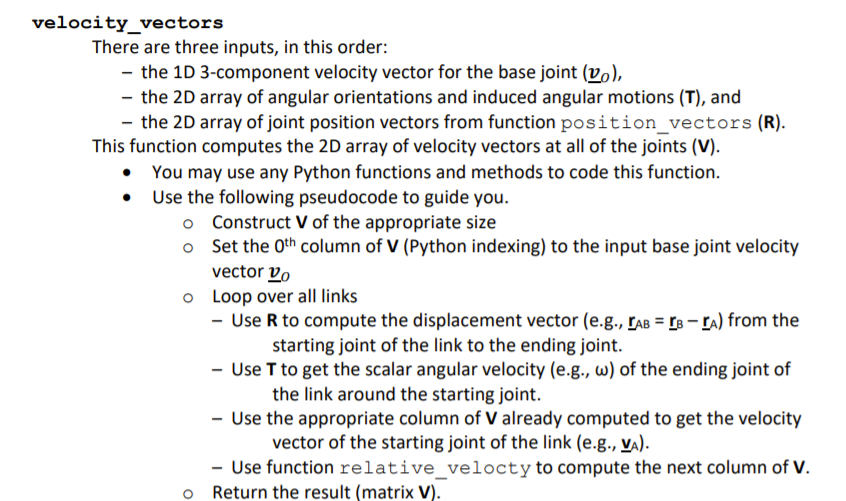
velocity_vectors There are three inputs, in this order: - the 1D 3-component velocity vector for the base joint (vo), - the 2D array of angular orientations and induced angular motions (T), and - the 2D array of joint position vectors from function position_vectors (R). This function computes the 2D array of velocity vectors at all of the joints (V). You may use any Python functions and methods to code this function. Use the following pseudocode to guide you. o Construct V of the appropriate size Set the oth column of V (Python indexing) to the input base joint velocity vector vo o Loop over all links - Use R to compute the displacement vector (e.g., Lab = 18 ra) from the starting joint of the link to the ending joint. - Use T to get the scalar angular velocity (e.g., w) of the ending joint of the link around the starting joint. - Use the appropriate column of V already computed to get the velocity vector of the starting joint of the link (e.g., VA). Use function relative_velocty to compute the next column of V. Return the result (matrix V)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts