

Question: Your task is to design a microprogrammed controller for a simple robot with 4 sensors (see figure A). The sensor output will go high only
Your task is to design a microprogrammed controller for a simple robot with 4 sensors (see figure A). The sensor output will go high only if there is a wall or an obstruction within a certain distance. For example, if F-1, there is an obstruc- tion or wall in the forward direction. In particular, your controller is supposed to communicate with a motor controller unit shown in figure B. The flow chart that describes the control algorithm is shown in figure C. The outputs such as MFTS. MRT, MLT, MUT, and STP, andd the status signals such as FMC. and TC will be high for one clock period. Assume that a power on reset causes the controller to go the WAIT STATE 0.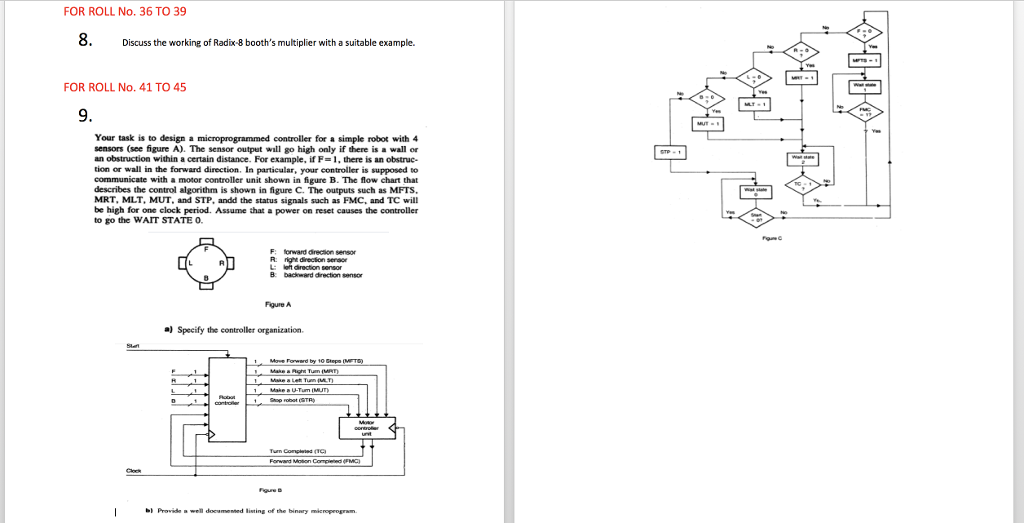 #QUESTION NUMBER 9
#QUESTION NUMBER 9
https://www.dropbox.com/s/1h9ezlkmch78lgk/ASSIGNMENT%203%20consolidated-1.pdf?dl=0
FOR ROLL No. 36 TO 39 .Discuss the working of Radix-8 booth's multiplier with a suitable example. FOR ROLL No. 41 TO 45 Your task is to design a microprogrammed controller for a simple robot with4 sensors (see figure A). The sensor output will go high only if there is a wall or an obstruction within a certain distance. For example, if F-1, there is an obstruc- tion or wall in the forward direction. In particular, your controller is supposed to communicate with motor controller unit shown in figure B. e flow chart that describes the control algorithm is shown in figure C. The outputs such as MFTS, MRT, MLT, MUT, and STP, andd the status signals such as FMC, and TC will be high for one clock period. Assume that a power on reset causes the coatroller to go the WAIT STATE O. F: forward drecion sensor R itdirection seraor Figure A a) Speeify the controller organization Tum IMUT) I Provideell docume nsed listing of the binwry micnopogram
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts