

Question: Your Task ( part 2 ) : Now that you've implemented q - learning for one task, you will move to the mountain car task.
Your Task part :
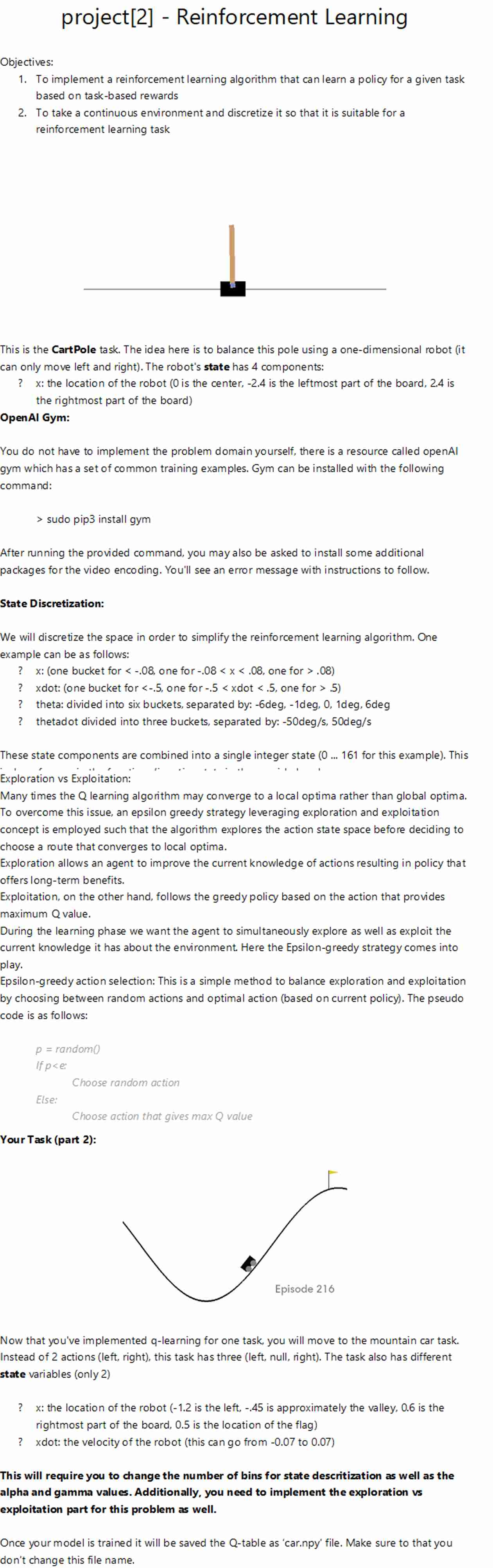
Now that you've implemented qlearning for one task, you will move to the mountain car task.
Instead of actions left right this task has three left null, right The task also has different
state variables only
: the location of the robot is the left, is approximately the valley, is the
rightmost part of the board, is the location of the flag
xdot: the velocity of the robot this can go from to
This will require you to change the number of bins for state descritization as well as the
alpha and gamma values. Additionally, you need to implement the exploration vs
exploitation part for this problem as well.
Once your model is trained it will be saved the Qtable as 'car.npy file. Make sure to that you
don't change this file name.
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock