

Refer to The International Journal of Robotics Research (Dec. 2004) study of a robot-sensor system in an
Question:
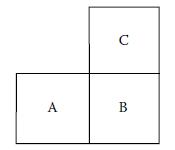
Refer to The International Journal of Robotics Research (Dec. 2004) study of a robot-sensor system in an unknown environment, Exercise 4.7. In the three-point, single-link robotic system shown in the accompanying figure, each point (A, B, or C) in the system has either an “obstacle” status or a “free” status. Let X = 1 if the A ↔ B link has an “obstacle” and X = 0 if the link is “free” (i.e., has no obstacles). Similarly, let Y = 1 if the B ↔ C link has an “obstacle” and Y = 0 if the link is “free.” Recall that the researchers assumed that the probability of any point in the system having a “free” status is .5 and that the three points in the system operate independently.
a. Give p(x, y), the joint probability distribution of X and Y, in table form.
b. Find the conditional probability distribution, p1(x Ι y).
c. Find the marginal probability distribution, p1(x).
Data from Exercise 4.7
Engineers at Broadcom Corp. and Simon Fraser University collaborated on research involving a robot-sensor system in an unknown environment. (The International Journal of Robotics Research, Dec. 2004.) As an example, the engineers presented the three-point, single-link robotic system shown in the accompanying figure. Each point (A, B, or C) in the physical space of the system has either an “obstacle” status or a “free” status. There are two single links in the system: A ↔ Band B ↔ C . A link has a “free” status if and only if both points in the link are “free.” Otherwise, the link has an “obstacle” status. Of interest is the random variable Y, the total number of links in the system that are “free.”
Step by Step Answer:


Statistics For Engineering And The Sciences
ISBN: 9781498728850
6th Edition
Authors: William M. Mendenhall, Terry L. Sincich
