

Question: A compensator for a heat exchange control system is given by [D(s)=frac{10 s+20}{0.1 s+0.5}] (a) Use the Matched Pole Zero (MPZ) method to design an
A compensator for a heat exchange control system is given by
\[D(s)=\frac{10 s+20}{0.1 s+0.5}\]
(a) Use the Matched Pole Zero (MPZ) method to design an equivalent digital compensator \(D(z)\). Use a sampling time of 1 second.
(b) What is the Modified Matched Pole Zero (MMPZ) method? What is its advantage? What is its drawback?
(c) For the same continuous-time compensator \(D(s)\), use the Tustin approximation method to design a digital compensator \(D(z)\). Use a sampling time of 1 second.
(d) Compare the two compensators obtained in
(a) and (c).
(e) If we use a much lower sampling time, say 0.01 seconds, what will happen to the performance of the two compensators? Why is this the case?
(f) What is the critical limitation of digital approximation methods? Describe the direct discrete design of digital systems.
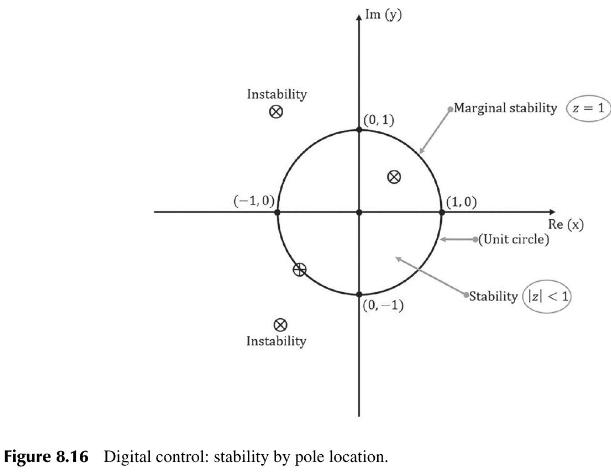
Im (y) Instability Marginal stability (z=1) (0, 1) (-1,0) (1.0) Re (x) (Unit circle) Stability (z
Step by Step Solution
3.33 Rating (156 Votes )
There are 3 Steps involved in it
a Given the continuous controller an equivalent digital controller must be designed using the MPZ method The first step is expressing Ds in terms of a controller gain a zero factor and a pole factor T... View full answer

Get step-by-step solutions from verified subject matter experts