

The pendulum system in Figure 8.35 consists of a uniform thin rod of length (l) and a
Question:
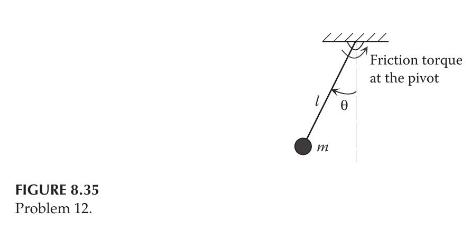
The pendulum system in Figure 8.35 consists of a uniform thin rod of length \(l\) and a concentrated mass \(m\) at its tip. The friction at the pivot causes the system to be damped. When the angular displacement \(\theta\) is not very small, the system is described by the nonlinear model
\[m l^{2} \ddot{\theta}+0.24 \dot{\theta}+\frac{1}{2} m g l \sin \theta=0\]
Assume, in consistent physical units, that \(m l^{2}=1.5, \frac{g}{I}=6.8\). Two sets of initial conditions are to be considered: (1) \(\theta(0)=10^{\circ}, \dot{\theta}(0)=0\), and (2) \(\theta(0)=20^{\circ}, \dot{\theta}(0)=0\). Using the RK4 method plot the two angular displacements \(\theta_{1}\) and \(\theta_{2}\) corresponding to the two sets of initial conditions versus \(0 \leq t \leq 10\) in the same graph. Angle measures must be converted to radians.
Step by Step Answer:

This question has not been answered yet.
You can Ask your question!

Modeling And Analysis Of Dynamic Systems
ISBN: 9781138726420
3rd Edition
Authors: Ramin S. Esfandiari, Bei Lu
