

Consider the vacuum worlds of Figure 4.18 (perfect sensing) and Figure 14.7 (noisy sensing). Suppose that the
Question:
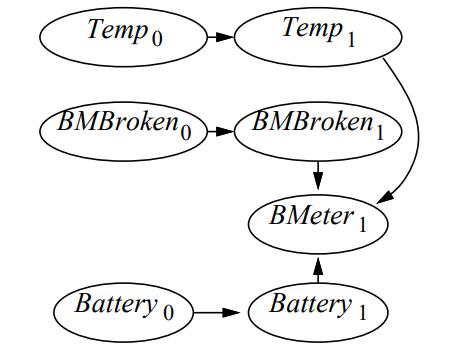
Consider the vacuum worlds of Figure 4.18 (perfect sensing) and Figure 14.7 (noisy sensing). Suppose that the robot receives an observation sequence such that, with perfect sensing, there is exactly one possible location it could be in. Is this location necessarily the most probable location under noisy sensing for sufficiently small noise probability ϵ? Prove your claim or find a counterexample.
Figure 14.7
Fantastic news! We've Found the answer you've been seeking!
Step by Step Answer:
Let be the single possible location under deterministic sensing Certainly as 0 we expect intuitively ...View the full answer

Answered By
Muhammad Umair
I have done job as Embedded System Engineer for just four months but after it i have decided to open my own lab and to work on projects that i can launch my own product in market. I work on different softwares like Proteus, Mikroc to program Embedded Systems. My basic work is on Embedded Systems. I have skills in Autocad, Proteus, C++, C programming and i love to share these skills to other to enhance my knowledge too.
1+ Reviews
10+ Question Solved
Related Book For 
Artificial Intelligence A Modern Approach
ISBN: 9780134610993
4th Edition
Authors: Stuart Russell, Peter Norvig
Question Posted:
