

Question: Implement a performance-measuring environment simulator for the vacuum-cleaner world depicted in Figure 2.2 and specified on page 40. Your implementation should be modular so that
Implement a performance-measuring environment simulator for the vacuum-cleaner world depicted in Figure 2.2 and specified on page 40. Your implementation should be modular so that the sensors, actuators, and environment characteristics (size, shape, dirt placement, etc.) can be changed easily.
Figure 2.2
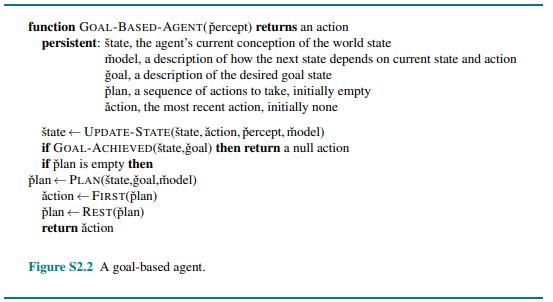
function GOAL-BASED-AGENT (percept) returns an action persistent: tate, the agent's current conception of the world state model, a description of how the next state depends on current state and action goal, a description of the desired goal state plan, a sequence of actions to take, initially empty ction, the most recent action, initially none tate + UPDATE-STATE(tate, action, percept, model) if GOAL-ACHIEVED (tate.goal) then return a null action if plan is empty then plan + PLAN(tate,goal,model) ction FIRST(plan) plan REST (plan) return ction Figure S2.2 A goal-based agent.
Step by Step Solution
3.30 Rating (159 Votes )
There are 3 Steps involved in it
package vacworld import agent import javaio A simulator for the vacuum cleaning world environment This environment is inaccessible deterministic static and discrete public class VacuumWorld extends En... View full answer

Get step-by-step solutions from verified subject matter experts