

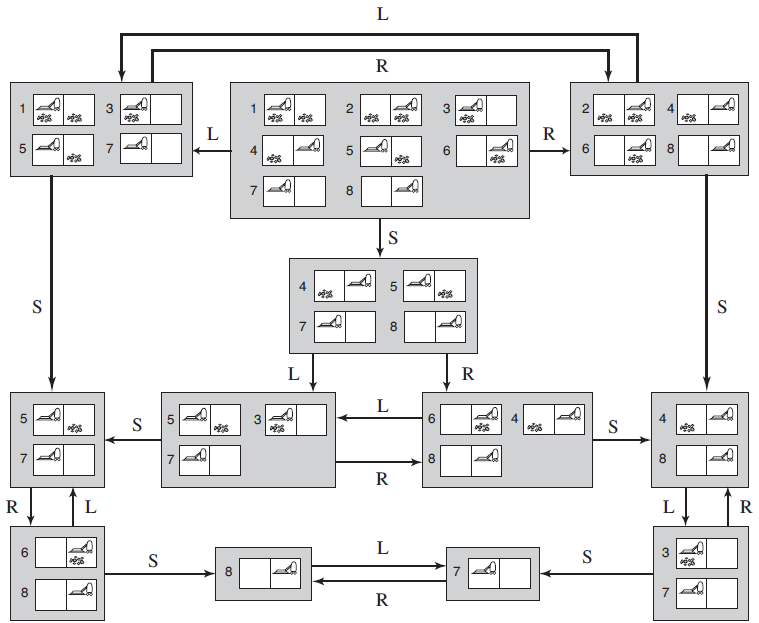
Question: In Section 4.4.1 we introduced belief states to solve sensorless search problems. A sequence of actions solves a sensorless problem if it maps every physical
Figure 4.14.
R R 5 5 R 5 R 3 8 RI 2. CO 2.
Step by Step Solution
★★★★★
3.47 Rating (157 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

A sequence of actions is a solution to a belief state problem if it takes every initial physic... View full answer
Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock