

Question: The rotations of a robot arm such as that shown in Fig. 16.10 are often represented by matrices. The values represent trigonometric functions of the
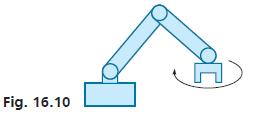
The rotations of a robot arm such as that shown in Fig. 16.10 are often represented by matrices. The values represent trigonometric functions of the angles of rotation. For the following rotation matrix R, find R−1.
R = 0.8 0.0 -0.6 0.0 1.0 0.0 0.6 0.0 0.8
Step by Step Solution
★★★★★
3.53 Rating (177 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

We are given the matrix R 08 00 06 00 10 00 06 00 08 We ... View full answer
Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock