

Question: Robot-sensor system configuration. Engineers at Broadcom Corp. and Simon Fraser University collaborated on research involving a robot-sensor system in an unknown environment (The International Journal
Robot-sensor system configuration. Engineers at Broadcom Corp. and Simon Fraser University collaborated on research involving a robot-sensor system in an unknown environment
(The International Journal of Robotics Research, Dec. 2004).
As an example, the engineers presented the three-point, single-
link robotic system shown in the accompanying figure.
Each point (A, B, or C) in the physical space of the system has either an “obstacle” status or a “free” status. There are two single links in the system: A4B and B4C. A link has a “free” status if and only if both points in the link are “free”; otherwise the link has an “obstacle” status. Of interest is the random variable x: the total number of links in the system that are “free.”
a. List the possible values of x for the system.
b. The researchers stated that the probability of any point in the system having a “free” status is .5. Assuming that the three points in the system operate independently, find the probability distribution for x.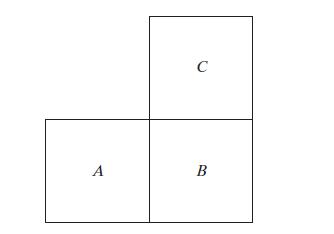
C A B
Step by Step Solution
3.36 Rating (152 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts