

Question: Design a PI compensator for the position control system shown in Fig. P 8.15, to achieve the following design goals: (i) Steady state error for
Design a PI compensator for the position control system shown in Fig. P 8.15, to achieve the following design goals:
(i) Steady state error for ramp input
(ii) Peak overshoot for step input
Use frequency response approach.
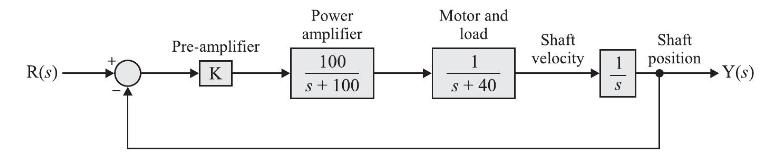
R(s) Pre-amplifier K Power amplifier 100 s + 100 Motor and load 1 s + 40 Shaft velocity Shaft 1 position Y(s)
Step by Step Solution
★★★★★
3.49 Rating (159 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock