

Question: A position control is to be designed with a 20%overshoot and a settling time of 2 seconds. You have on hand an amplifier and a
A position control is to be designed with a 20%overshoot and a settling time of 2 seconds. You have on hand an amplifier and a power amplifier whose cascaded transfer function is K1/(s + 20) with which to drive the motor. Two 10-turn pots are available to convert shaft position into voltage. A voltage of ±5π volts is placed across the pots. A dc motor whose transfer function is of the form
is also available. The transfer function of the motor is found experimentally as follows: The motor and geared load are driven open loop by applying a large, short, rectangular pulse to the armature. An oscillogram of the response shows that the motor reached 63% of its final output value at 1/2 second after the application of the pulse. Further, with a constant 10 volts dc applied to the armature, the constant output speed was 100 rad/s.
a. Draw a complete block diagram of the system, specifying the transfer function of each component when the system is operating with 20% overshoot.
b. What will the steady-state error be for a unit ramp input?
c. Determine the transient response characteristics.
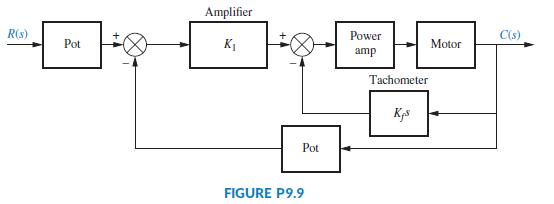
d. If tachometer feedback is used around the motor, as shown in Figure P9.9, find the tachometer and the amplifier gain to meet the original specifications. Summarize the transient and steady-state characteristics.
0,(s) K Ea(s) s(s + a)
Step by Step Solution
3.31 Rating (169 Votes )
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts