

In Chapter 7, Figure P7.31 shows the block diagram of the speed control of an HEV rearranged
Question:
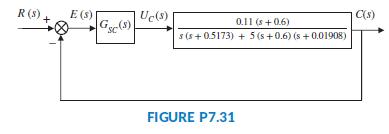
In Chapter 7, Figure P7.31 shows the block diagram of the speed control of an HEV rearranged as a unity feedback system (Preitl, 2007). Let the transfer function of the speed controller be
a. Assume first that the speed controller is configured as a proportional controller KISC = 0 and GSC (s) = KPSC . Calculate the forward path open loop poles. Now use MATLAB to plot the system’s root locus and find the gain, KPSC that yields a critically damped closed-loop response. Finally, plot the time-domain response, c(t), for a unit-step input using MATLAB. Note on the curve the rise time, Tr, and settling time, Ts.
b. Now add an integral gain, KISC, to the controller, such that KISC / KPSC = 0.4. Use MATLAB to plot the root locus and find the proportional
gain, KPSC, that could lead to a closed loop unit-step response with 10% overshoot. Plot c(t) using MATLAB and note on the curve the peak time, Tp, and settling time, Ts. Does the response obtained resemble a second-order under damped response?
Step by Step Answer:

This question has not been answered yet.
You can Ask your question!


