

Question: Motion control, which includes position or force control, is used in robotics and machining. Force control requires the designer to consider two phases: contact and
Motion control, which includes position or force control, is used in robotics and machining. Force control requires the designer to consider two phases: contact and noncontact motions. Figure P7.30(a) is a diagram of a mechanical system for force control under contact motion. A force command, Fcmd(s), is the input to the system, while the output, F(s), is the controlled contact force.
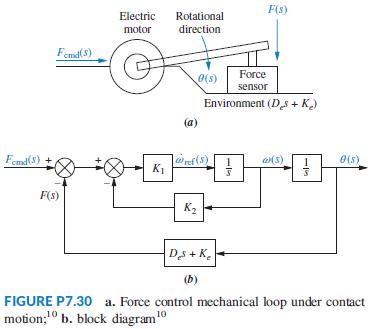
In the figure a motor is used as the force actuator. The force output from the actuator is applied to the object through a force sensor. A block diagram representation of the system is shown in Figure P7.30(b). K2 is velocity feedback used to improve the transient response. The loop is actually implemented by an electrical loop (not shown) that controls the armature current of the motor to yield the desired torque at the output. Recall that Tm = Kt ia (Ohnishi, 1996). Find an expression for the range of K2 to keep the steady-state force error below 10% for ramp inputs of commanded force.
F(s) Electric Rotational motor direction Femd(8) Force 0(s) sensor Environment (Ds + K) (a) Femd(3) a(s) 0(s) K1 F(s) K2 Ds + K. (b) FIGURE P7.30 a. Force control mechanical loop under contact motion; b. block diagram10
Step by Step Solution
3.38 Rating (164 Votes )
There are 3 Steps involved in it
To find the expression for the range of K2 that keeps the steadystate force error below 10 for ramp ... View full answer

Get step-by-step solutions from verified subject matter experts