

Question: Problem 23 in Chapter 1 discusses the cruise control of serial, parallel, and split-power hybrid electric vehicles (HEVs). The functional block diagrams developed for these
Problem 23 in Chapter 1 discusses the cruise control of serial, parallel, and split-power hybrid electric vehicles (HEVs). The functional block diagrams developed for these HEVs indicated that the speed of a vehicle depends upon the balance between the motive forces (developed by the gasoline engine and/or the electric motor) and running resistive forces. The resistive forces include the aerodynamic drag, rolling resistance, and climbing resistance. Figure P2.40 illustrates the running resistances for a car moving uphill (Bosch, 2007).
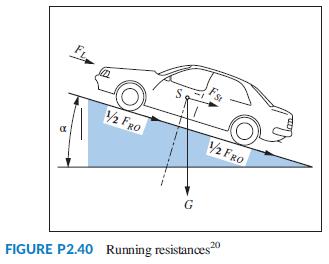
The total running resistance, Fw, is calculated as Fw = FRo + FL + FSt, where FRo is the rolling resistance, FL is the aerodynamic drag, and FSt is the climbing resistance. The aerodynamic drag is proportional to the square of the sum of car velocity, v, and the head-wind velocity, vhw, or v + vhw. The other two resistances are functions of car weight, G, and the gradient of the road (given by the gradient angle, α), as seen from the following equations:
FRo = fG cos α = fmg cos α
where
f = coefficient of rolling resistance
m = car mass; in kg
g = gravitational acceleration; in m/s2
FL = 0:5ρCwA(v + vhw)2.
and
ρ = air density; in kg/m3
Cw = coefficient of aerodynamic drag
A = largest cross-section of the car; in kg=m2
FSt = G sin α = mg sin α:
The motive force, F, available at the drive wheels is:
![]()
where
T = motive torque
P = motive power
itot = total transmission ratio
r = tire radius
ηtot = total drive-train efficiency:
The surplus force, F - Fw, accelerates the vehicle (or retards it when Fw > F). Letting a = F - Fw/km · m, where a is the acceleration and km is a coefficient that compensates for the apparent increase in vehicle mass due to rotating masses (wheels, flywheel, crankshaft, etc.):
a. Show that car acceleration,21 a, may be determined from the equation:
F = fmg cos α + mg sin α + 0:5ρCwA(v + vhw)2 + km ma
b. Assuming constant acceleration and using the average value for speed, find the average motive force, Fav (in N), and power, Pav (in kW) the car needs to accelerate from 40 to 60 km/h in 4 seconds on a level
road, (α = 0°), under windless conditions, where vhw = 0. You are given the following parameters: m = 1590 kg, A = 2m2, f = 0:011, ρ = 1.2 kg/m3, Cw = 0.3, ηtot = 0.9; km = 1:2. Furthermore, calculate the additional power, Padd, the car needs after reaching 60 km/h to maintain its speed while climbing a hill with a gradient α = 5°.
c. The equation derived in Part a describes the nonlinear car motion dynamics where F (t) is the input to the system, and v(t) the resulting output. Given that the aerodynamic drag is proportional to v2 under windless conditions, linearize the resulting equation of motion around an average speed, vo = 50 km/h, when the car travels on a level road,22 where α = 0°. (Expand v2 - v02 in a truncated Taylor series). Write that equation of motion and represent it with a block diagram in which the block Gv represents the vehicle dynamics. The output of that block is the car speed, v(t), and the input is the excess motive force, Fe(t), defined as: Fe = F - FSt - FRo + Fo, where Fo is the constant component of the linearized aerodynamic drag.
d. Use the equation in Part c to find the vehicle transfer function: Gv(s) = V(s)/Fe(s).
2 FRo 2 FRO G 20 FIGURE P2.40 Running resistances
Step by Step Solution
3.38 Rating (160 Votes )
There are 3 Steps involved in it
a To derive the equation for car acceleration we start with the given equation for surplus force a F Fwkm m and substitute the expressions for Fw FRo FL and FSt based on the resistive forces given Fw ... View full answer

Get step-by-step solutions from verified subject matter experts