

Some medical procedures require the insertion of a needle under a patients skin using CT scan monitoring
Question:
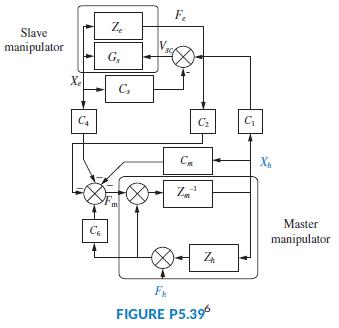
Some medical procedures require the insertion of a needle under a patient’s skin using CT scan monitoring guidance for precision. CT scans emit radiation, posing some cumulative risks for medical personnel. To avoid this problem, a remote control robot has been developed (Piccin, 2009). The robot controls the needle in position and angle in the constraint space of a CT scan machine and also provides the physician with force feedback commensurate with the insertion opposition encountered by the type of tissue in which the needle is inserted. The robot has other features that give the operator the similar sensations and maneuverability as if the needle was inserted directly. Figure P5.39 shows the block diagram of the force insertion mechanism, where Fh is the input force and Xh is the output displacement. Summing junction inputs are positive unless indicated with a negative sign. By way of explanation, Z= impedance; G= transfer function; Ci =communication channel transfer functions; F= force; X =position. Subscripts h and m refer to the master manipulator. Subscripts s and e refer to the slave manipulator.
a. Assuming Zh = 0; C1 = Cs; C2 = 1 + C6 and C4 = Cm use Mason’s Rule to show that the transfer function from the operators force input Fh to needle displacement Xh is given by

b. Now with Zh ≠ 0 show that Xh(s)/Fh(s) = Y(s)/1 + Y(s)Zh
Step by Step Answer:



