

A robotic joint is modeled as a mechanical system with rotors of moments of inertia J and
Question:
A robotic joint is modeled as a mechanical system with rotors of moments of inertia J and 2J, connected by a viscoelastic coupling (a parallel array of a torsional spring and a torsional dashpot) with torsional stiffness k and torsional damping coefficient c, as indicated in Fig. 5.23.
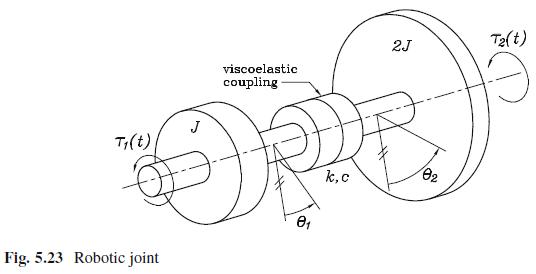
(a) Derive the mathematical model of the system in terms of the angles θ1 and θ2 shown in Fig. 5.23 if we know that the spring in the coupling is unloaded when these two coordinates are identical.
(b) Under the assumption that τ2(t) = − τ1(t) and that all initial conditions are zero, the torque τ (t) experienced by the coupling at its ends can be expressed in the form
![]()
Find expressions for ke and ce in terms of the system parameters.
(c) Under the same conditions as in item (b) above, τ1(t) is modeled as a harmonic torque of amplitude τ0 and frequency ω. Thus, the steady-state torque transmitted to the coupling is also harmonic with an amplitude τT and a phase angle ψ. Using Bode plots, rather than lengthy calculations, find the ratio τT /τ0, if ζe = 0.5 and ωe = ω/5, where ce = 2ζeωeJ and ke = ω2e J.
Step by Step Answer:


Dynamic Response Of Linear Mechanical Systems Modeling Analysis And Simulation
ISBN: 9781461429463
1st Edition
Authors: Jorge Angeles
