

Question: A hydrobot is under consideration for remote exploration under the ice of Europa, a moon of the giant planet Jupiter. Figure DP4.6 (a) shows one
A hydrobot is under consideration for remote exploration under the ice of Europa, a moon of the giant planet Jupiter. Figure DP4.6
(a) shows one artistic version of the mission. The hydrobot is a selfpropelled underwater vehicle that would analyze the chemical composition of the water in a search for signs of life. An important aspect of the vehicle is a controlled vertical descent to depth in the presence of underwater currents. A simplified control feedback system is shown in Figure DP4.6(b). The parameter J 7 0 is the pitching moment of inertia.
(a) Suppose that Gc1s2 = K. For what range of K is the system stable?
(b) What is the steady-state error to a unit step disturbance when Gc(s) = K?
(c) Suppose that Gc1s2 = Kp + KDs. For what range of Kp and KD is the system stable?
(d) What is the steady-state error to a unit step disturbance when Gc1s2 = Kp + KDs?
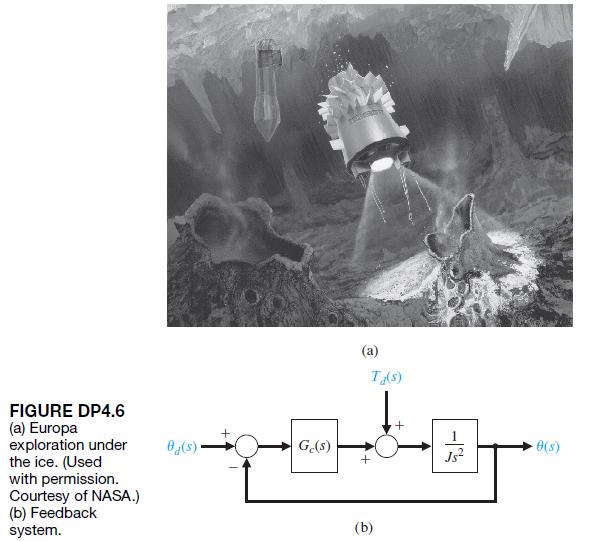
FIGURE DP4.6 (a) Europa exploration under the ice. (Used with permission. Courtesy of NASA.) (b) Feedback system. 04(s). (a) T(S) 2005 Ge(s) + (b) Js B(s)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts