

Question: A three-axis pick-and-place application requires the precise movement of a robotic arm in threedimensional space, as shown in Figure AP10.1 for joint 2. The arm
A three-axis pick-and-place application requires the precise movement of a robotic arm in threedimensional space, as shown in Figure AP10.1 for joint 2. The arm has specific linear paths it must follow to avoid other pieces of machinery. The overshoot for a step input should be less than 13%.
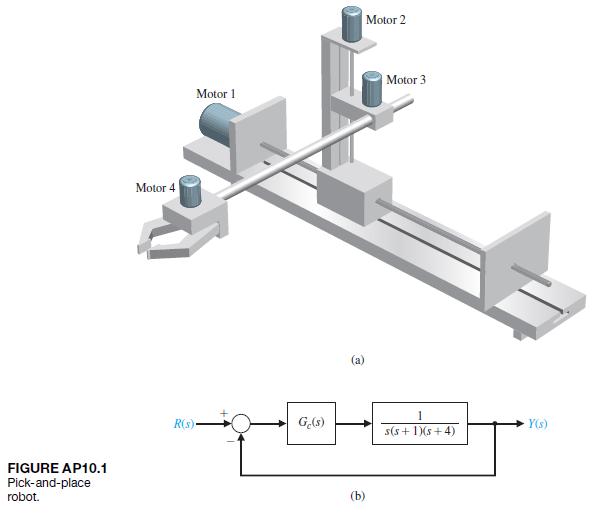
(a) Let Gc1s2 = K, and determine the gain K that satisfies the requirement. Determine the resulting settling time (with a 2% criterion).
(b) Use a phase-lead compensator and reduce the settling time to Ts … 3 s.
FIGURE AP10.1 Pick-and-place robot. Motor 4 Motor 2 Motor 3 Motor 1 1 R(s) Ge(s) Y(s) s(s+1)(s+4) (b)
Step by Step Solution
There are 3 Steps involved in it

Get step-by-step solutions from verified subject matter experts