

Question: E3.20 For the simple pendulum shown in Figure E3.20, the nonlinear equations of motion are given by 8 (1) + sin (1)+(t) = 0. m
E3.20 For the simple pendulum shown in Figure E3.20, the nonlinear equations of motion are given by
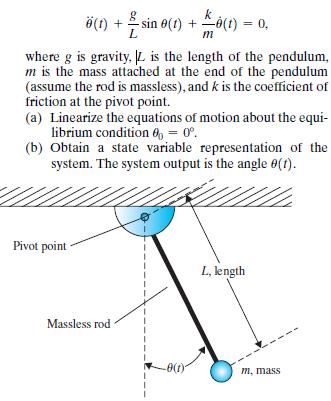
8 (1) + sin (1)+(t) = 0. m where g is gravity. |L is the length of the pendulum, m is the mass attached at the end of the pendulum (assume the rod is massless), and k is the coefficient of friction at the pivot point. (a) Linearize the equations of motion about the equi- librium condition 0 = 0. (b) Obtain a state variable representation of the system. The system output is the angle (1). Pivot point Massless rod L, length -0(1) m, mass
Step by Step Solution
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock