

Question: Consider the double-jointed robotic arm shown in the figure. Let the lower arm be modeled by a = (2,3,4) the middle arm be modeled by
Consider the double-jointed robotic arm shown in the figure. Let the lower arm be modeled by a = (2,3,4) the middle arm be modeled by b = (1, -1, 3) and the upper arm by c = (4,-1,-2) where units are in feet.
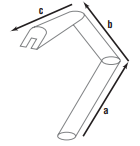
(a) Find a vector d that represents the position of the hand.
(b) Determine the distance of the hand from the origin.
b
Step by Step Solution
★★★★★
3.33 Rating (168 Votes )
There are 3 Steps involved in it
1 Expert Approved Answer
Step: 1 Unlock

a 234 113 412 214311432 715 ... View full answer
Question Has Been Solved by an Expert!
Get step-by-step solutions from verified subject matter experts
Step: 2 Unlock
Step: 3 Unlock